|
|
||||||||||||||||||||||
Non Pressure-Compensated ControlAs of 5/25/04, the backhoe can successfully track both the PHANToM and a computer generated trajectory without unwanted vibrations. These vibrations were eliminated by rebuilding the PVG32 valves without pressure compensation. See data file for tracking and pressure data. |
|
|||||||||||||||||||||
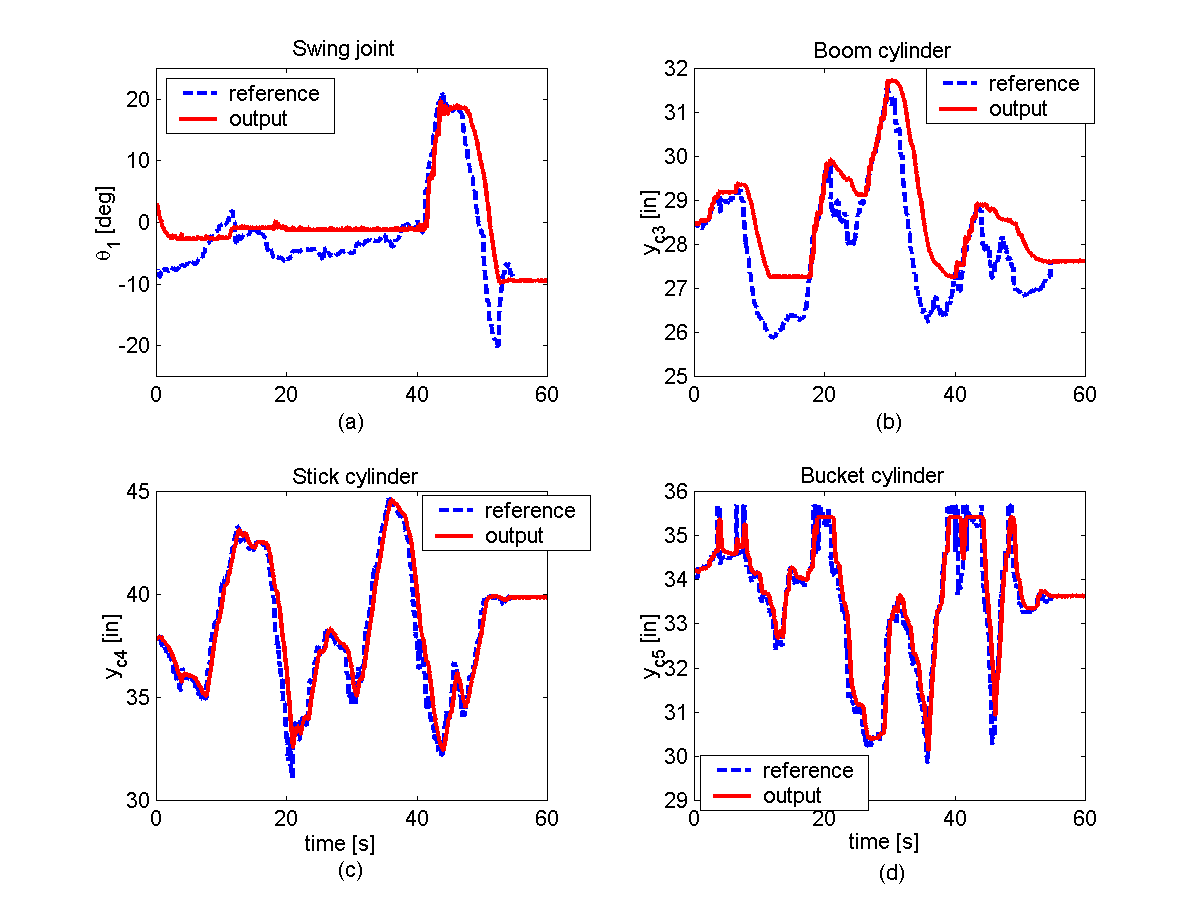
Four Degree of Freedom Haptic Control
The PHANToM was programmed to generate a reference position command for the backhoe and simultaneously display haptic forces on the hand of the operator proportional to position error. The video clip on the left shows the backhoe and PHANToM operating under haptic position control using bilateral communication. The second video clip from the left illustrates the same motion animated in Pro/ENGINEER. The third figure from the left is a snapshot of the top-level diagram of the Simulink model that runs the backhoe in real time. The fourth figure from the left shows the position tracking data from the video on the left in cylinder coordinates. The figure on the right illustrates the workspace transformations that map backhoe into the PHANToM's workspace and vice versa. See also the thesis presentation. |
||||||||||||||||||||||
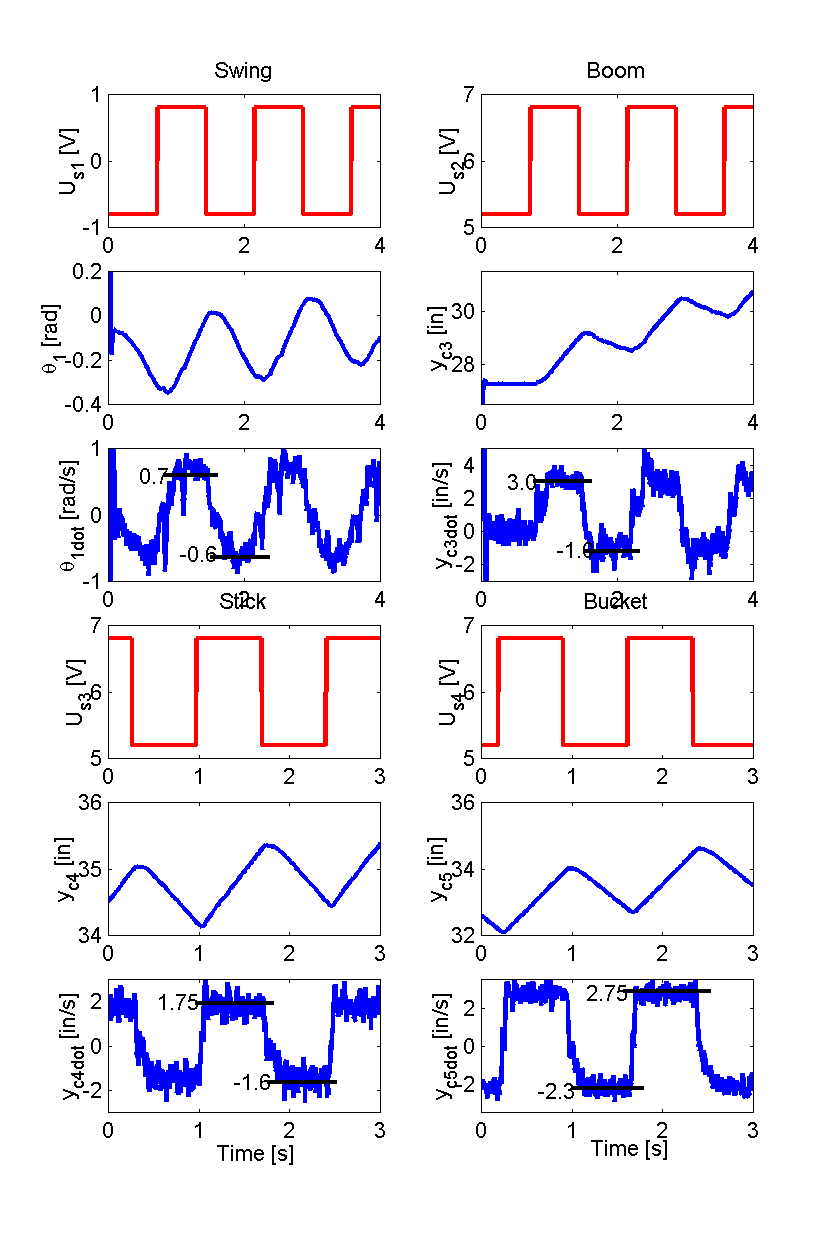
Four Degree of Freedom Computer Control
|
||||||||||||||||||||||
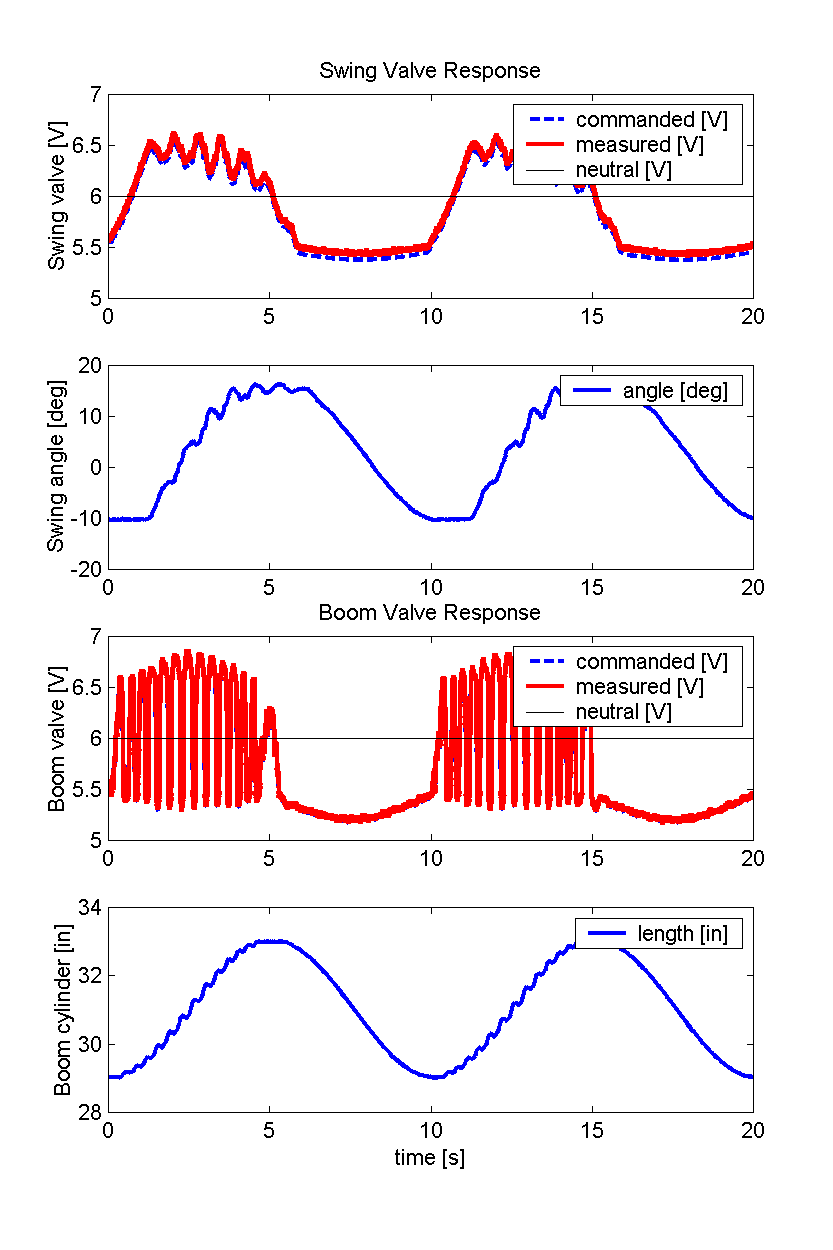
Single Degree of Freedom Haptic Control |
||||||||||||||||||||||
|
||||||||||||||||||||||
Single DOF Video |
||||||||||||||||||||||
|
||||||||||||||||||||||
Marginal Undamped Stability |
||||||||||||||||||||||
|
||||||||||||||||||||||
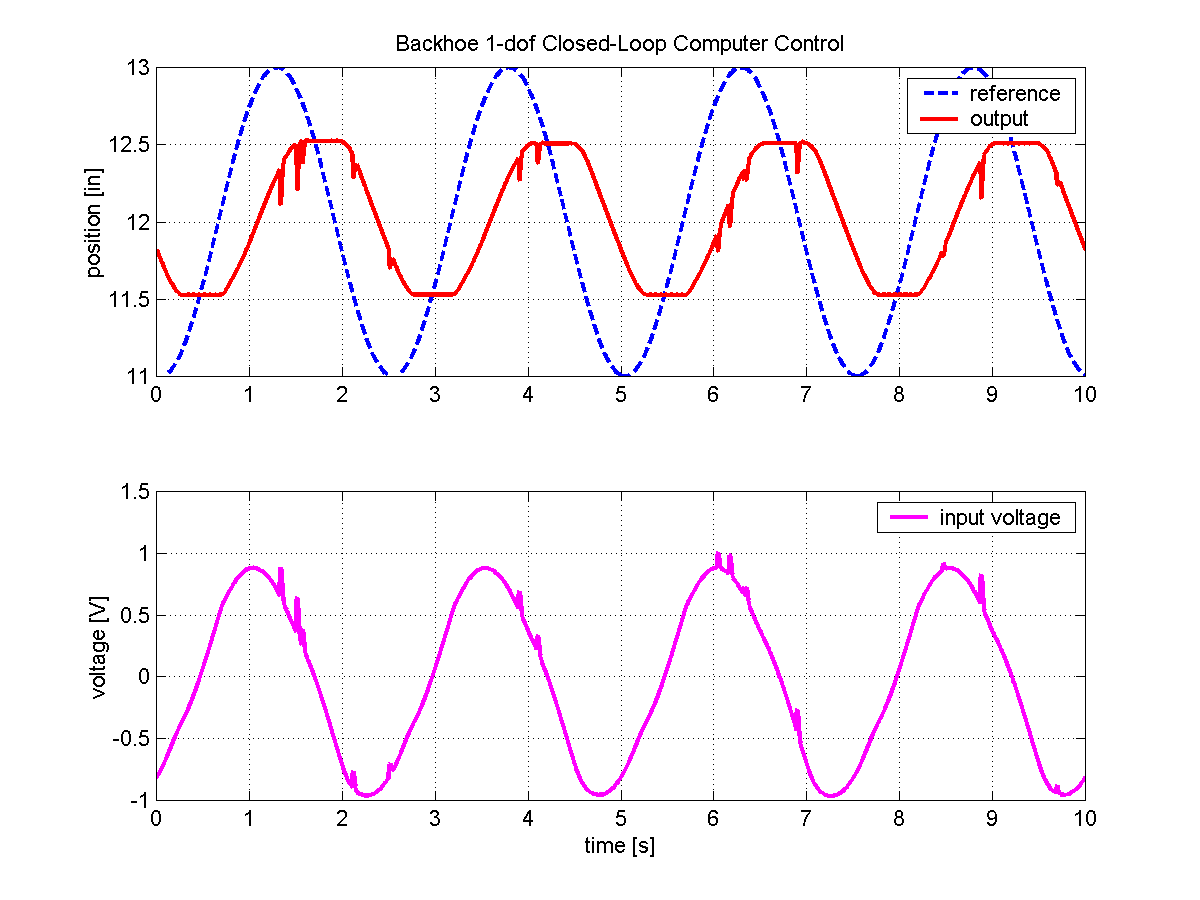
Closed-Loop Data |
||||||||||||||||||||||
|
||||||||||||||||||||||