The traditional method to control hydraulic equipment has been accomplished
with the use of manual proportional valves. For example, a typical diesel powered earthmoving vehicle generates hydraulic pressure with a pump, which
is mechanically driven by the engine. The pump delivers hydraulic power to
its implements, such as a backhoe, loader, or auger, via manual valves that
are controlled by the operator. A direct mechanical connection exists
between the operator’s hand and the spool in the valve through a lever and
connecting linkages. The spool must be displaced from its zero position to
allow high-pressure fluid to flow from the pump to the cylinders and cause
the implement to move. Each lever may control either one or two degrees of
freedom of the implement.
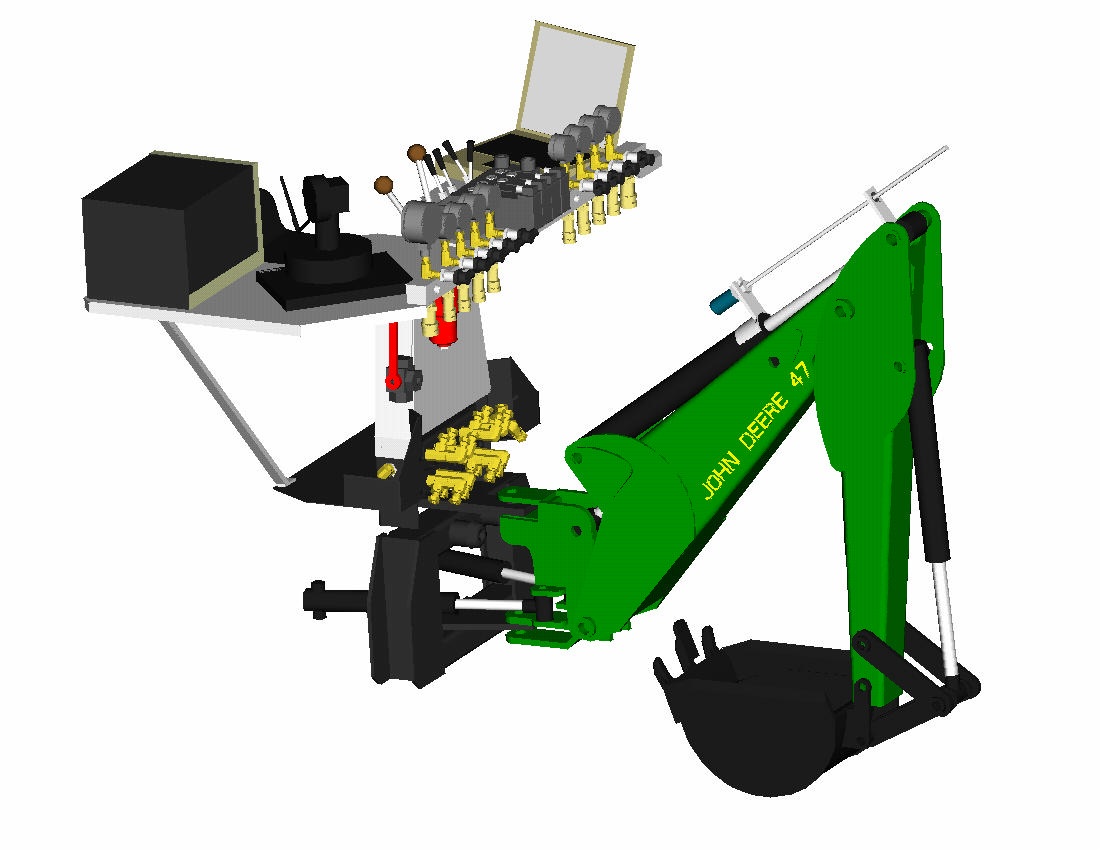
When working with a backhoe, the operator must control multiple levers simultaneously in order to
produce the desired end-effector (bucket) motion, which is a skill that
takes time to learn. Also, feedback information on the forces experienced by
the bucket is limited, in the form of compliance in the levers due to
cylinder pressure changes, engine speed changes under load, and vehicle
vibration. The purpose of this project is to explore the viability of
applying modern control techniques to hydraulic earthmoving equipment.
The
current design includes feedback control and haptic force display to
the operator’s hand. It is proposed that with proper control system design,
the implement’s performance and user interface can both be improved for
greater productivity and shorter operator training time, without significant
increases in manufacturing costs.