Selected Projects
Postdoctoral Fellow and GRA (PhD Student) (Sept. 2001 to Present) Special Reports: Georgia Tech online News: http://www.gatech.edu/news-room/release.php?id=996 Georgia Tech Report on Innovation : http://gtresearchnews.gatech.edu/reshor/rh-ss05/commercialization.pdf Magzine "Research Horizontal": http://gtresearchnews.gatech.edu/newsrelease/haptics.htm
|
|||
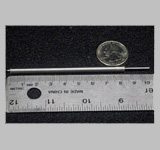 |
Capacitance-coupled Position Sensing Capacitance-coupled Position Transducer (CPT) is a novel displacement sensor similar to Linear Variable Differential Transformer (LVDT). It is a byproduct from the research on Digital Clay . It has similar performance to an Linear Variable Differential Transformer (LVDT) while its structure is far simpler and costs much less...more |
||
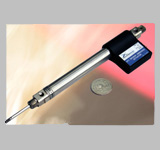 |
Ubiquitous Sensing for every Linear Actuator The idea of ubiquitous sensing for every linear actuator is to incorporate every linear actuator with a very low cost but high performance linear displacement sensor. CCPT sensor, due to its low cost, simple structure and high performance, is very suitable for this purpose... more |
||
 |
Digital Clay is a novel human computer interface that provides a 3D tangible haptic surface for humans to view, touch and reshape with their hands. It can be described as an interactive "TV" whose pixels can pop out from the screen to form a surface for a human to view and touch. Potential applications cover a wide range such as CAD, scientific research, medical diagnostics...more |
||
Senior Engineer and Research Engineer ( Aug. 1998 to Jul. 2001)
|
|||
 |
Single Motor Driven Hyper-Redundant Robotic Manipulator A novel snake-like robotic manipulator with more than 20 DOFs driven by single motor. All DOFs can be independently controlled. No motor is in each unit. Unit's weight is greatly reduced, thus, the payload, flexibility and the manipulator length are increased...more |
||
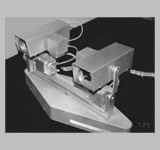 |
Stereo Robot Vision System The main difference between this stereo robot vision system and others is that it can always keep the image planes of the cameras on the pivoting axis. This means that the image plane's rotation is always of pure rotation (i.e., no offset). [Click the image to enlarge and see more pictures] |
||
 |
CAN bus Motion controller This Miniature CAN-Bus Control System (with amplifiers) can control 3 server motors or 3 step motors. The size is 5cm x 3cm x 1cm. An Intel microcontroller (87c196cb) is used as the microprocessor. It is designed to fit into each unit of the "Single Motor Driven Hyper Redundant Manipulator " to control the manipulator using CAN Bus. [Click the image to enlarge and see more pictures] |
||
 |
HARO-II Humanoid Robot It's a mobile (wheeled) humanoid robot based on the technology of "Single motor driving multiple DOFs". Fewer actuators are needed compared to conventional humanoid robots. It is designed to use the sound and touch screen to communicate with the user. [Click the image to enlarge and see more pictures] |
||
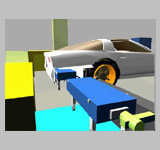 |
Electrical Vehicle Battery System and Apparatus The invention provides a solution to swap and recharge the battery using a method similar to current gas station. When a vehicle goes into the battery station, the battery can be automatically swapped in minutes |
||
GRA (Master Student) ( Aug. 1995 to Mar. 1998)
|
|||
 |
Project "Flexible Robot" is the predecessor of the single motor driven hyper-redundant manipulator. It was a project aimed at a nation-wide design competition. It uses the same power transmission scheme. It has 7 DOFs, and looks like a worm. It can stick on the wall and walk using two micro-sucker embedded suction discs at its ends...more |
||
Undergraduate Student (Aug. 1991 to Jul. 1995)
|
|||
 |
Kink-rod Synchronous Universal Joint It is a universal joint that allows a much bigger angle offset (0~90 degree) between the coupled shafts compared to current existing universal joint (< 45 degree). The motion coupling is synchronous, and of high efficiency even at 90 degree. The flexible robot utilizes this universal joint to couple the center shafts of two conjunct units. |
||
 |
Sucking Disk with Micro Suckers Embedded It is a suction disc composed of large number of micro suckers. It has a novel mechanism that operates based on the pressure difference across each micro sucker. Each time before sucking, the mechanism is reset. When the suction disc is vacuumed, those leaking micro suckers will be closed by the mechanism immediately due to the bigger pressure difference compared to those non-leaking micro suckers. The mechanism is of pure mechanical system and very simple. Therefore it has higher reliability and lower cost compared to those electrically controlled suction discs. Experiments verified its ability to work on cracked and rugged surfaces. |
||