Introduction
Conventional robot manipulator has a motor for every degree of freedom (DOF). This scheme works pretty well when the number of degree of freedoms (DOF) is small. However in some applications, such as working in complex spaces, hyper-redundant DOF manipulators are needed. This kind of manipulator is also known as snake-like robot arm. For a snake robot arm, the large number of DOFs increases not only the number of motors but also the body weight and reduces the payload. Reports are found using cables instead of motorized servo system to drive the manipulator. However, this introduces the compliance and complexity.
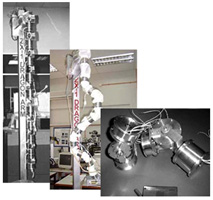
The hyper redundant robot manipulator introduced here provides a solution of transferring actuation power by the rotational motion of a central shaft in each unit. This approach utilized the mechanical rotation instead of electrical power. All the central shafts are coupled together by a certain mechanism like a universal joint. The central shaft chain is driven by one motor located outside the manipulator. Each joint can be actuated by energizing the PWM controlled clutch inside the unit to couple the central shaft to the servo mechanism on the joint. No motor inside each unit makes the unit lightweight. The prototype implemented by myself has 20 independent DOFs, and is 1.8 meter in length. Each unit is modularly designed and can be easily reconstructed to achieve desired DOFs and length.
|
 Conventional Universal Joint Conventional Universal Joint |
 |
 Kink-rod Universal Joint Kink-rod Universal Joint |
||
|
 Flexible Shaft Flexible Shaft |
|
 Bevel Gear Set Bevel Gear Set |
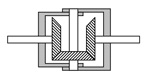
Power Transmission Type
The key to realize the concept is the mechanical motion transmission structure. Several motion transmission mechanisms were investigated as shown in the above figure (left), including: Universal Joint, Flexible Shaft, and Bevel Gear Set.
The Kink-rod Synchronous Universal Joint is initially considered because of its unique features such as high transmission efficiency and large allowable angle offset (0-90 degree). However, Bevel Gear Set is finally applied due to its simplicity and low cost.
[Control Box] [Control Simulation] [The Hardware] [Modular Unit]
![[Control Box]](p_Controller.jpg){kind=link}
![[The Hardware]](Prototype1.jpg){kind=link}
![[Modular Unit]](Units1.jpg){kind=link}