Introduction [Click to download the Introduction Video]
Surface interaction with tactile and proprioceptive (haptic) senses is one of the most common experiences for people in every day life. It is valuable for design, exploration of medical and scientific artifacts, operation of a range of products employing buttons, keys, knobs and switches, and is critical for the visually impaired. Visual interpretation of surface topology is reinforced with haptic experience, and the success of purely visual displays of surface topology relies on illusions created for the eyes, essentially fooling the mind into interpreting a flat screen as a 3D image.
A project underway at the Georgia Institute of Technology has confronted these challenges and produced several prototypes with significant advances in the creation of a surface suitable for haptic interaction. Work presented here is one line of the approaches -- the planar hydraulic actuator array. Many obstacles were overcome in the creation of the current device. Limited by the space, here I will not attempt to present all the details on any of them. Its purpose is to provide an integrated view of how they work together to provide researchers with a new perspective on what can be achieved and how. Some of the rationale for directions taken will be provided as well. This will explain why some things were done and others were not in the composition of a complex mechatronic system. (More details can be found in the related publications at the bottom of each section.
The Idea
 |
 |
 |
|---|---|---|
Communication Through a Tangible Surface |
Digital Clay Concept |
The Pin-Art |
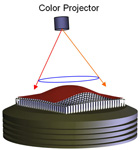
The idea and concept of Digital Clay, at the current technology stage, is to construct and control a massive hydraulic actuator array to:
- Provide a 3D/2.5D tangible surface actuated under the control of a computer
- Respond to pressure in a haptic/semi-haptic fashion
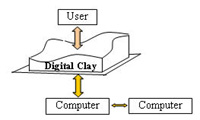
- Provide a bi-directional interaction means between a user and a computer, i.e.,
- The user shapes the surface; the computer acquires the surface shape
- The computer commands the surface shape; the user sees and/or feels the shape and the virtual material properties
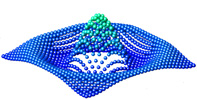
In reality, the Digital Clay is similar to a powered version of a toy named as "Pin Art"
Potential Application
Part of the potential applications are listed below:
|
|
|
 |
 |
 |
Actuation Principle - Fluid Power
An early decision was made to concentrate on fluid power for actuation, as opposed to electromagnetic, shape memory alloys, piezoelectric or other possible technologies.
Spatial scale and resolution: The JND (Just Noticeable Difference) for tactile stimulus (0.7-0.9mm) is one way to establish this resolution.Actuation force: The top forces should allow comfortable handling by a user and permit resolution of response to inputs used to edit a shape in a molding operation. Pressure supported by actuation should thus be on the order of 5 to 10 lbf/in2 (22-44N).
Motion speed: When commanded to display a new shape, either through a haptic editing cue or through computer generated signal, a new shape should take place “promptly” and not distract the user from concentrating on the purpose at hand. The total distance should be traveled in the duration of one second is a reasonable target.
To provide the above behaviors fluid power seems well suited. It can directly provide 5 to 10 lbf/in2 (3.45-6.9kPa) of pressure with actuator pistons occupying about ½ the area of the surface. Speed of actuation will then require ½ × area × travel/time or .00025m3/sec. The distribution of this flow to multiple valves, the number of which depends on resolution and the connecting circuitry, can be reached without extreme difficulty. When compared to other forms of actuation, fluid power excels in its ability to provide the needed force and velocity combination, the ability to route the power to the point of its application, and to control the motion conveniently with electrical signals via solenoid actuated valves. There are definitely challenges associated with fluid actuation as well. Careful design to contain or eliminate leakage is necessary, and ameliorated by the use of water as the actuating fluid. Miniature solenoid valves are relatively expensive and occupy significant space. MEMS valves may some day be suitable, but currently do not provide sufficient low. Electromechanical actuators deliver power at high speed and low force that requires impedance matching devices that further occupy space and add friction. Piezoelectric and shape memory alloy actuators have the opposite difficulty, providing high forces but low speed and/or travel.
Crust or Body Generation of Shape
The interaction sought for crust haptics requires only the presentation of a two dimensional crust (non-planar) of the required topology to the user who will interact with the body. The support of that crust can depend partially on the adjoining crust elements or on the underlying body composition. A formable crust or shell provides some advantages but the challenges of support and actuation have led this project in other directions. A formable body can support its crust with an internal structure. Either a formable crust or formable body device can be 3 dimensional or 2.5 dimensional, as defined by computer aided design terminology. The latter choice is taken here and hence the crust has a functional definition z=f(x, y). For a given x and y only a single value of z will exist. This limitation is important for some applications but not others.
The result of the choices above leads to a device consisting of a 2 dimensional array of fluid actuated rods moving in parallel directions. The depth of the device is not a major problem, but compactness is desirable. With the proposed device the travel must be supported by an equal distance of the cylinder when the rod is retracted and an additional distance to support the moment generated by side forces that is reasonably somewhat less than the travel as well. A small thickness for valves and fluid conduits is needed resulting in a total thickness of about three times the travel of the rods.
  |
 |
Formable Crust Concept |
Formable Body Concept |
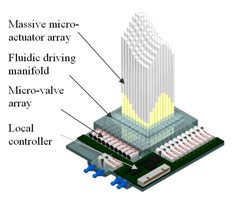
Hardware Composition
|
 |
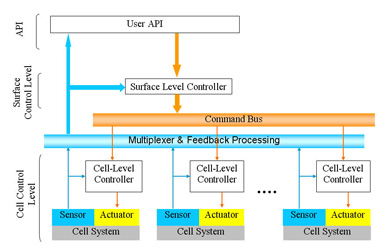
General Control Architecture
Modified Decentralize Control
|
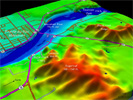
 Example of camera artifact for resolution evaluation
Example of camera artifact for resolution evaluation