
Single Cell Prototype
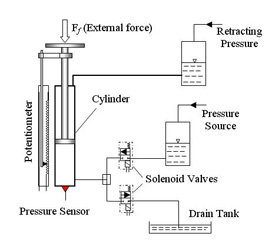
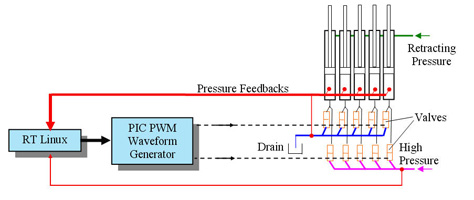
As a logical first step toward developing a prototype device, a single cell was designed and constructed. Miniature valves were used to actuate the device both up and down, for which purpose two, two-way, two-position solenoid valves were used to connect to a high pressure source or to a drain. Minimizing center to center spacing was not considered an initial priority and a small commercial graphite piston moving in a glass cylinder was used. The schematic of this system is shown in the figure below.
 |
 |
|---|---|
Single Cell Prototype |
Schematic Drawing of the Single Cell Prototype |
The issues resolved with this prototype included:
- The effectiveness of filtering the noisy pressure signals (generated by the solenoid valves) to extract the user applied forces
- The choice of control causality between the alternatives of impedance or admittance control
- Dynamics of the solenoid valves in response to pulse width modulated inputs
- The possibility of position control without position sensors
The feasibility of commanding the motion of the piston with a sequence of input gestures (forces and velocities). For the details of the experiments, please refer to the related publications at the bottom of this page.
Control Structure for Single Cell System
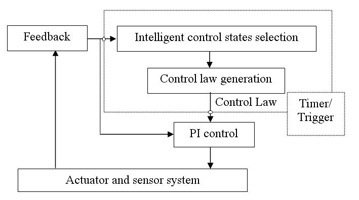
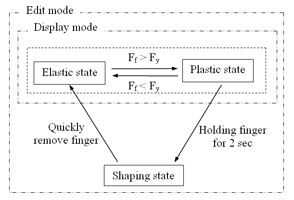
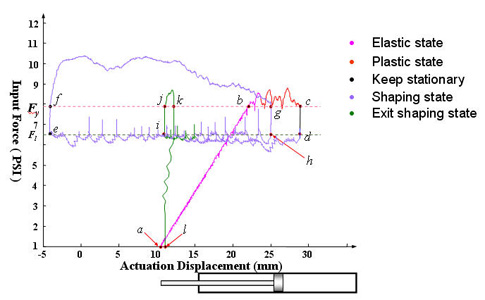
Device operation via user gesture is preferred to operation with frequent interaction with buttons, knobs or keyboard commands. The single cell prototype also enabled evaluation of portions of this concept. At the top level, two modes of behavior are envisioned: an editing mode and a display mode. Switching between modes does involve keyboard interaction. To implement these modes an elastic state, a plastic state and a shaping state were conceived as illustrated in the figure below. Based on interpretation of force cues the transition between states is commanded. It was essential to evaluate the feasibility of detecting the cues for the transition with the hardware and software that was evolving.
 |
 |
Control Archtechture for Single Cell |
High Level Control Strategy for User Interaction (for generation of the control law) |
Testing Results
Experimental results show that switching between the three states as shown in the state transition diagram is feasible. Experimental results are shown in following figure. The evolution and change of states is described as follows. Under edit mode, push the rod with gradually increasing force until the system went into plastic state. (Line ab indicates the elastic control state and curve bc indicates the plastic control state) Then hold the finger’s movement until the system goes into the shaping state. (Line cd) In the shaping state move the cylinder rod back and forth by controlling the finger force. (Curve de, ef, fg, gh, hi, ij and jk) Then quickly remove the finger, (Curve kl) let the system go into the elastic state (with a new zero load position --- point l). In the shaping state, when the finger force (proportional to the pressure in the cylinder) is between the upper limit force Fp and lower limit force Fl, the cylinder rod keeps stationary. This can be seen from the vertical line S, gh, ef, etc.
 |
5x1 Cell Array [Video of the 1x5 Cell Array Prototype]
A 5x1 prototype was constructed with the strategies evolving from the single cell. In this prototype, off the shelf componets are still utilized. Since it is difficult to find a displacement sensor small enough to put into each actuator, PWM displacement estiamtion method (designed and developed during the research on Single Cell) are applied. The objective was to study low level coordination between multiple cells. The lessons learned were both positive and negative. On the positive side, accurate motion control was indeed possible. With 5 cells slanted lines, sinusoidal shapes and arbitrary positions of both a static and dynamic character could be achieved. It became obvious that without a true position measurement that the variation between components and the change of components over time would be a major struggle. As a consequence an effort to develop a viable position sensor was undertaken.
 |
 |
1x5 Cell Array Prototype |
Schematic Drawing of 1x5 Cell Array System |
 Example of camera artifact for resolution evaluation
Example of camera artifact for resolution evaluation