Aaron Enes
Intelligent Machine Dynamics Laboratory
: advance : innovate : discover :
This page serves as a brief overview of engineering related projects I have been involved in; all are multi-month (and mostly collaborative) projects.
This page is meant to spark your interest and encourage you to contact me so we can discuss things further.
| RC Segway | HIL Simulation |
| A-DRAHMS | Hydraulic Motion Control |
| Fighter Jet Control | Custer Channel Wing |
| Engineering Mentor | Corporate Engineering |
: 1 : The Teetering Buffalo :

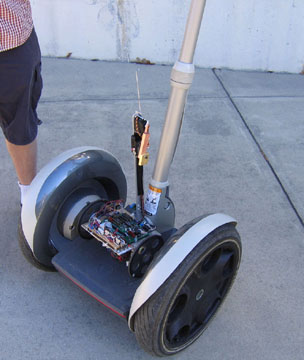
A remote control, self-balancing, two-wheeled robot. The robot is driven much like a real Segway: A controllable mass imbalance at the top of the robot causes it to "fall" forward or backward.
Video links (wmv):
spinning
high
performance driving
Competencies:
analytical system modeling: rigid body dynamics, motor dynamics, sensor response
control design: ensure stability, Kalman filtering of multiple sensor inputs (accelerometer, rate gyro)
system integration: implement controller in assembly language to run on HC11 microcontroller. Design motor drive electronics, sensor anti-aliasing filtering.
troubleshooting: tune controller parameters, debug electronics
: 2 : HIL Simulation :
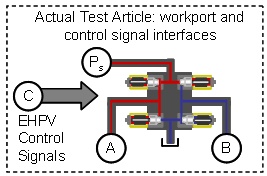
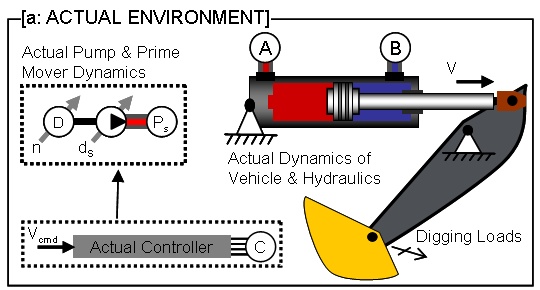
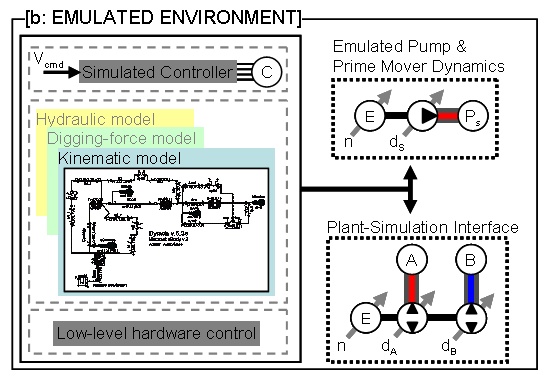

A hydraulic hardware-in-the-loop (HIL) testbed built to emulate the working loads experienced by an excavator's valve during digging. Essentially, we "trick" the valve into behaving as if installed in an actual excavator by controlling the hydraulic pressure and flow on the valve to mimic the real machine. The simulated excavator can be "driven" by an operator in real-time.
Competencies: real-time hydraulic control
designing and installing high-power hydraulic systems (in this case, 120+ horsepower)
developing a high-level architecture for controlling the teststand (i.e. defining communication protocols, data flow diagrams, etc.)
mathematical and empirical modeling of hydraulic pumps to design low-level pressure and flow controllers
experienced with industrial motor drives (Siemens MasterDrives), field bus communications (CANbus), and data acquisition
interfacing models with physical hardware for real-time control. Tools: Matlab xPC Target.
Competencies: excavator modeling
multi-domain modeling of complex system (rigid body and hydraulic system). Tools: MSC.Adams, Dymola/Modelica, SolidWorks, Simulink
model validation based on experimental data
: 3 : A-DRAHMS :
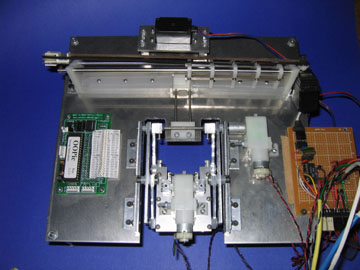
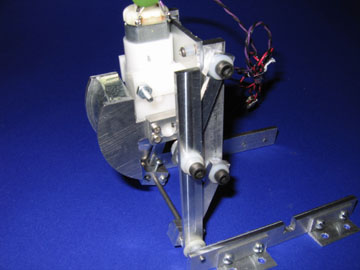
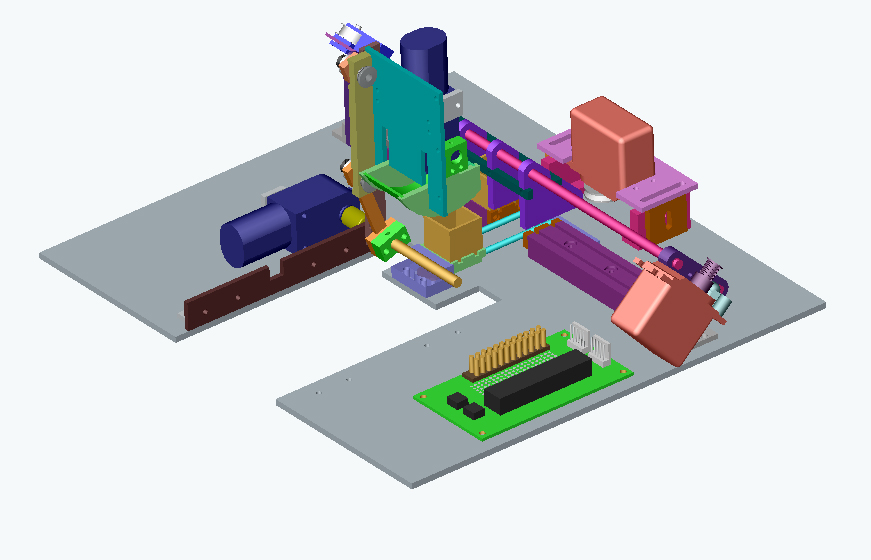
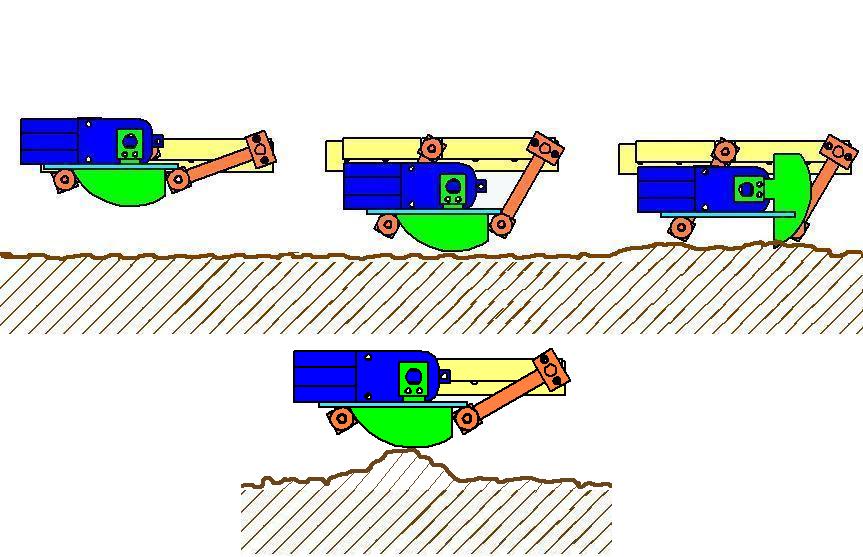
Autonomously-Driven, Roving, Adaptive Hazardous Materials Sampler (A-DRAHMS). This very inexpensive system is designed to mount on a modular locomotion platform and retrieve soil samples. The simple mechanism can scoop soil samples from uneven terrain. a unique, flexible bearing system allows linkages to flex, allowing for robust operation.
Competencies:
mechanical system design (focusing on robustness, fault tolerance). Tools: SolidWorks, WorkingModel.
hands-on fabrication experience
Microcontroller implementation of a "state machine" controller
: 4 : Precise Point-to-Point Motion Control with Hydraulic Cylinder:
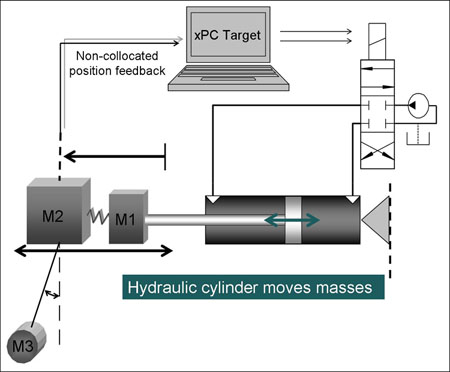
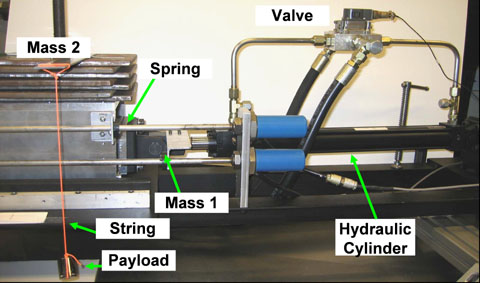
A payload (M3) is suspended from one of two coupled masses and a servo valve is controlled to actuate a cylinder in order to provide fast, stable, and low vibration motion control.
Video links (wmv):
Competencies:
modeling of complex hydro-mechanical system
designing a fast, stable controller with non-collocated feedback (there is compliance between the sensor and the actuator)
optimizing the controller to reduce payload oscillation
real time control using xPC Target
: 5 : Optimal Control of Fighter Jet for Rapid Climb:

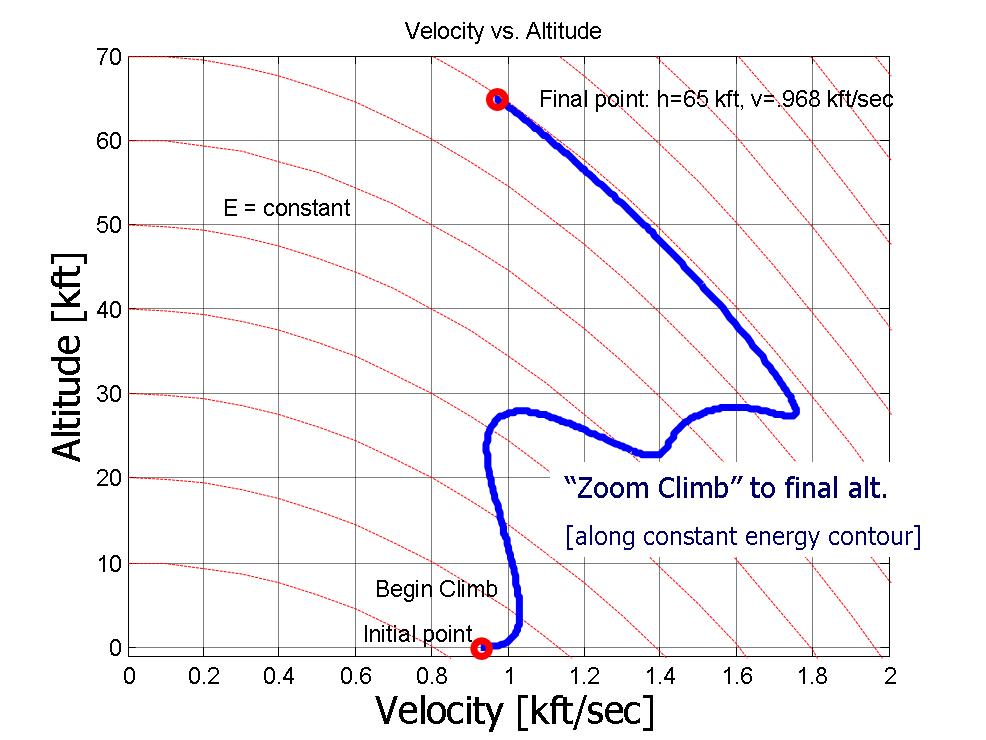
An 8th order, nonlinear model of an F4E Phantom jet is used to determine the optimal flight path angle and thrust profile required to reach 65 kft in minimal time
Video links (wmv):
Competencies:
high-order system modeling
non-linear optimal control techniques
analytical verification of optimality conditions
writing custom Matlab routines to solve optimal control problem
: 6 : Custer Channel Wing:
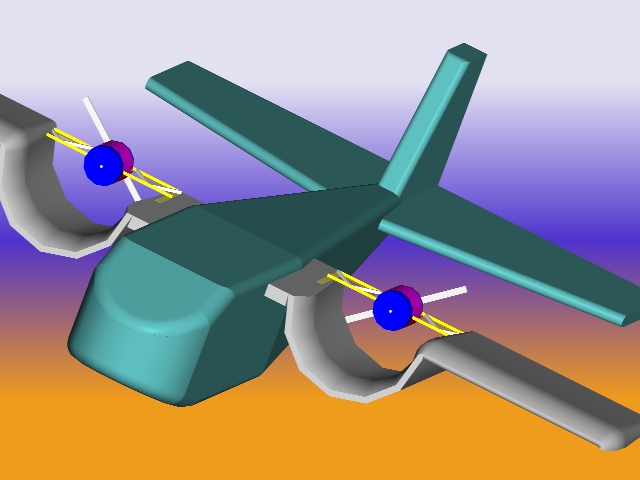
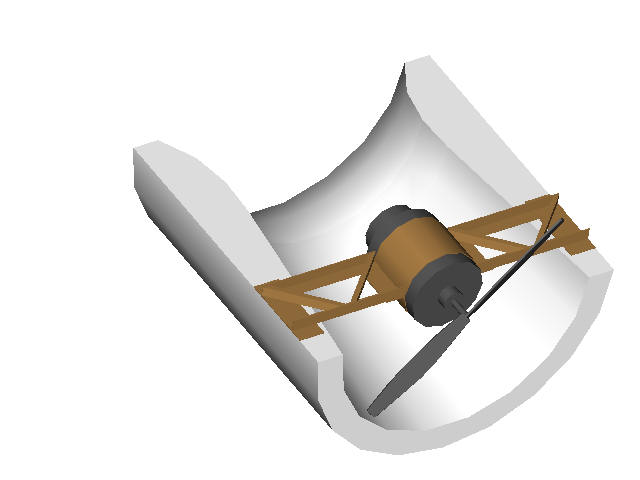
This project modeled, built, and tested the airfoil of the Custer Channel Wing, a super short take-off aircraft
Competencies:
analytical aerodynamic modeling/simulation (using Maple)
CAD solid modeling (SolidWorks)
experimentation, instrumentation of airfoil for testing
: 7 : Technical mentor, engineering education consultant:

volunteer for Atlanta area schools
provided project management advice, technical assistance, and engineer's insight to student teams and teachers preparing for robot competitions (FIRST, FIRST LEGO League)
taught students/teachers to troubleshoot mechanical and electronic issues
: 8 : Corporate engineering graduate intern: HUSCO, International.
Responsible for overhauling a large construction machine with an experimental electro-hydraulic control system; part of a time-critical prototype system for a major systems manufacturer. A unique opportunity with much responsibility.
Competencies:
Designed, Organized, Performed vehicle performance experiments
Developed custom software for analysis of experimental data
Managed resources to teardown and rebuild the hydraulic control system
The prototype has been displayed in at least three international industry expositions, featuring parameters directly chosen by myself
Engineering Projects
Aaron Enes
aaron.enes@gatech.edu