

Projects and Activities
Throughout my collegiate career I have undertaken many projects, both for class and for personal enjoyment. The following is a selection of a few of my more interesting and successful adventures and inventions.
Hydraulically Actuated Inverted Pendulum:
For our digital controls project a classmate (Erik Lee) and I sought to create a hydraulically actuated inverted pendulum. A naturally unstable system, the inverted pendulum is a classic controls problem. However, the hydraulic system bandwidth complicates this control as it limits the response time of the actuator, making it more difficult to catch the falling pendulum. Using a cascaded controller we were able to stabilize the system and demonstrate good disturbance rejection and trajectory tracking.
The World's Most Useless Machine:
Seeing this little device floating around instructables, I decided to make a couple, one for the office Christmas party and another for my fiancee's father. Its sole purpose is to turn itself off. Using a contact switch, a dpdt toggle switch, and a hobby servo modified for continuous rotation, when you flip the switch an arm emerges to switch itself off. Longke ended up taking it home and sending it to his daughter in Beijing. Hence, I manufactured something in the US that was sent to China, take that trade imbalance!
Bothoven, The Autonomous Music Playing Robot:
For our autonomous control of robotic systems course project, we decided to build a robot which could search its environment for scores of music to play, identify notes and play them on a physical piano. Thus we devised Bothoven, an amigobot which searches for music until it finds a centerline and follows it, identifying notes (custom vision algorithm) and sending their pitch and duration wirelessly to a custom robotic piano.
The robotic piano I fabricated for the project uses 8 solenoids and finger style elastic actuators to allow Bothoven to play a single octave of the C major scale. Thus many tunes were possible including: Mary Had a Little Lamb, Camp Town Races, Somewhere Over the Rainbow, and Jinglebells. Sadly Bad Romance by Lady GaGa requires a second octave and can not be performed at this time. Wireless communication and note selection are accomplished with an Arduino microcontroller and Xbee wireless serial adapter.
Adaptive Sliding Mode Control of Hydraulic Systems:
Hydraulic systems are highly nonlinear, thus for robust performance assurance sliding mode control (A robust nonlinear control technique) is a natural choice. However, this high speed switching gain algorithm has a tendancy to produce undesireable chatter at reasonable real time control loop rates. One method for reducing this chatter is simply to choose a smaller gain, however this limits the robustness of the control system. We proposed making this gain adaptive, growing with increased error (deviation from the desired sliding trajectory). To enforce an upper bound on the maximum allowable controller gain, the projection operator was employed, and sigma modification was used to reduce the sliding mode gain when the errors were small.
Test3
Outreach Activities:
Throughout my time at Georgia Tech I have had the opportunity to be involved with several K-12 outreach activities and organizations. The following clip is a test of a hovercraft built by high school students at the CEISMC Hovercraft Summer Camp 2010 for which I was an instructor.

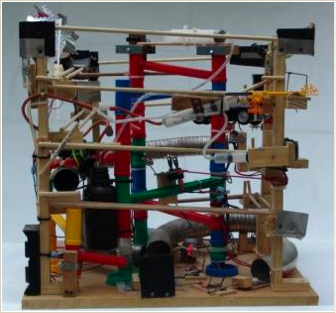
Miscellaneous Other Projects:
One of my oldest projects, this Rube Goldberg device was built for a competition in high school to turn on and off a light bulb. It uses mechanical, fluid, and electric power to maneuver a golf ball for exactly 1 minute and pop a balloon at the end turning the light off.
This is a warm weather bobsled made from two little girls bicycles, used for a Boy Scout competition. During the compeition it clocked in at 30+ mph

