|
|
||||||||||||
|
||||||||||||
|
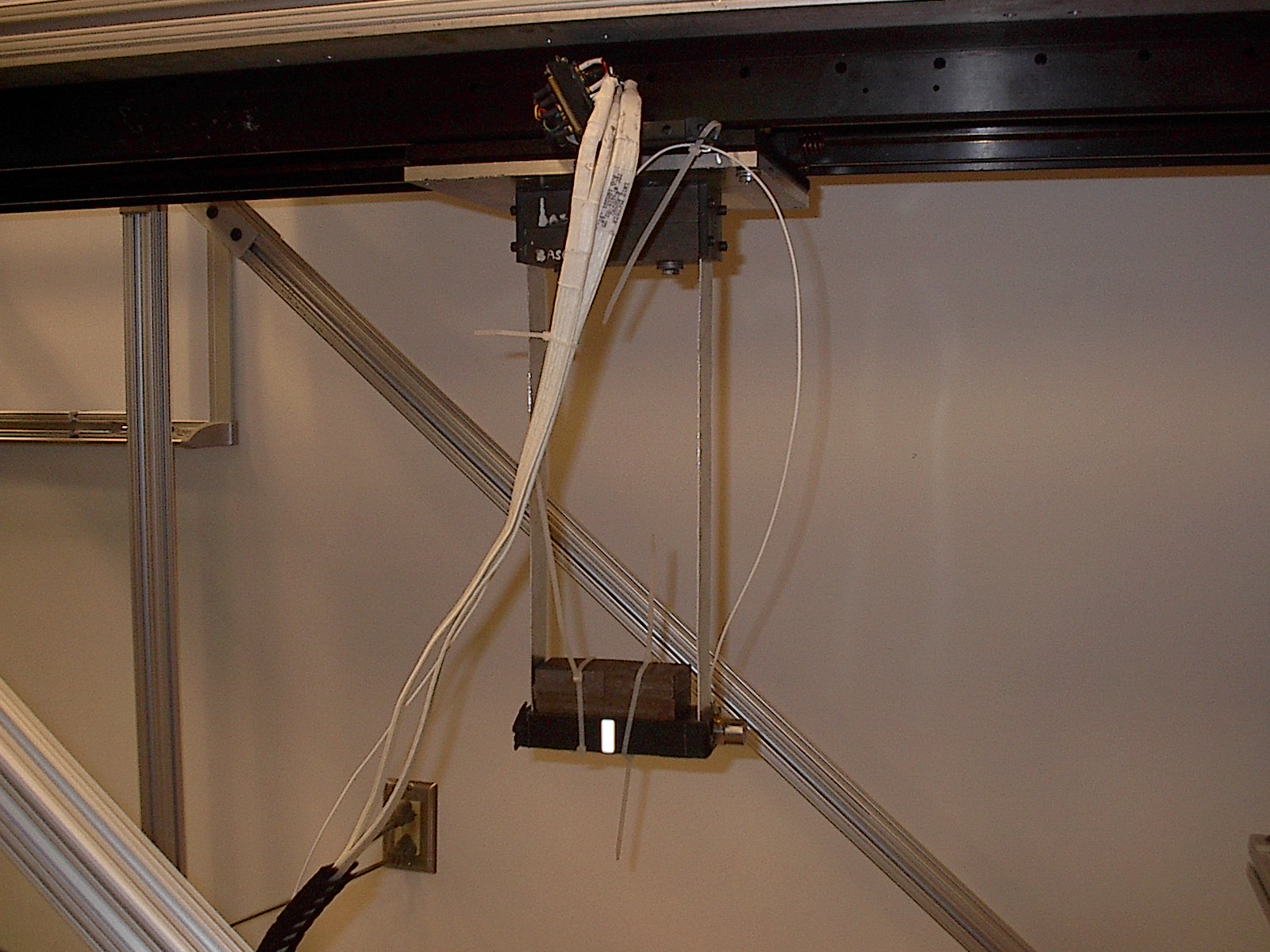
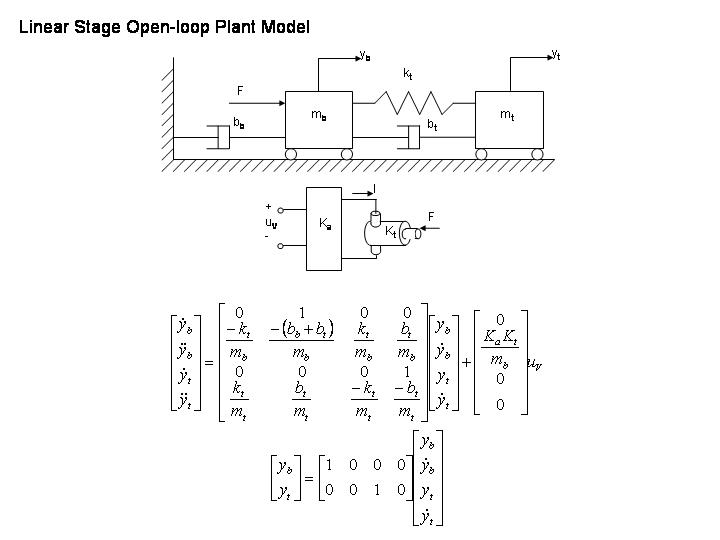
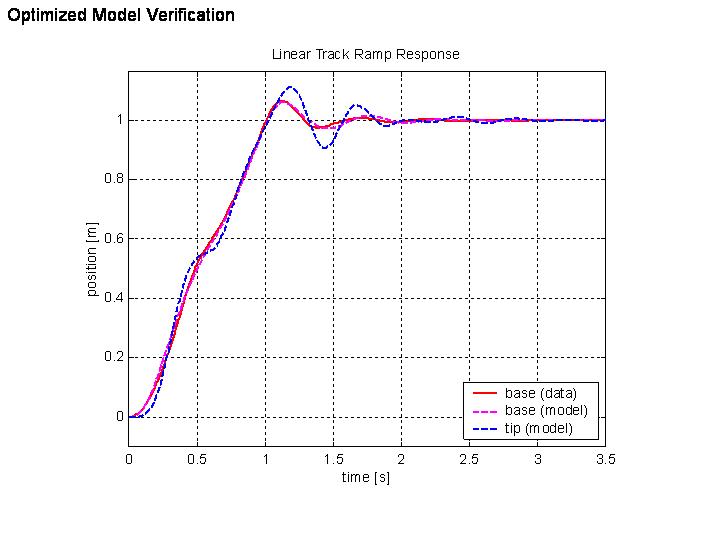
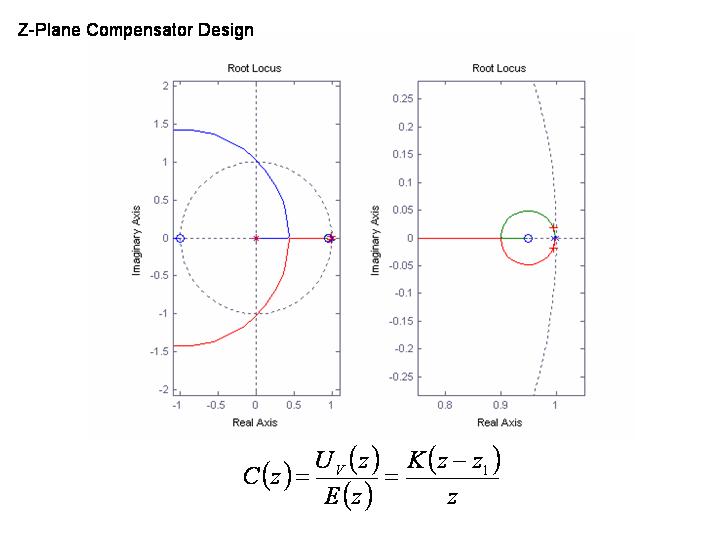
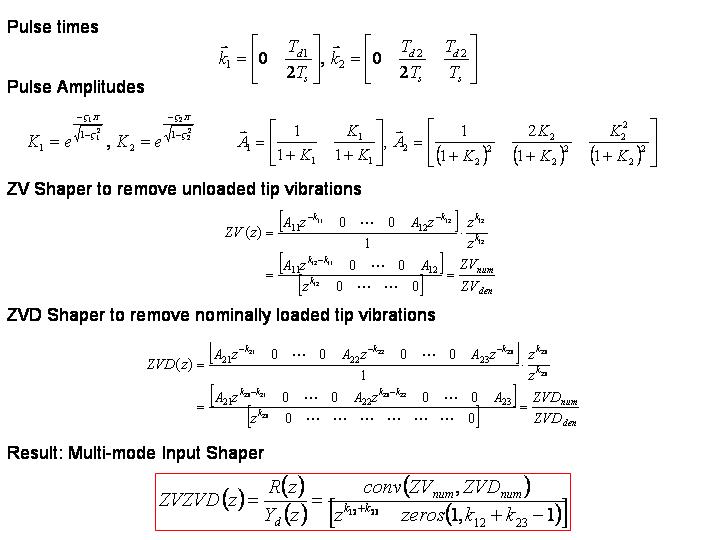
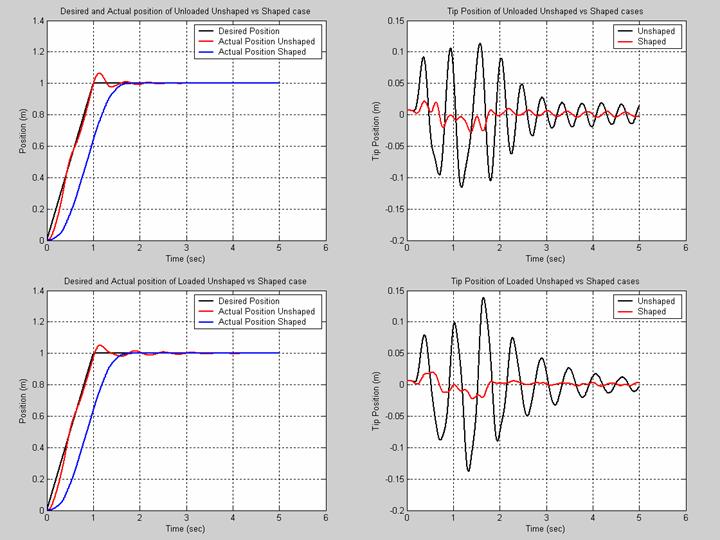
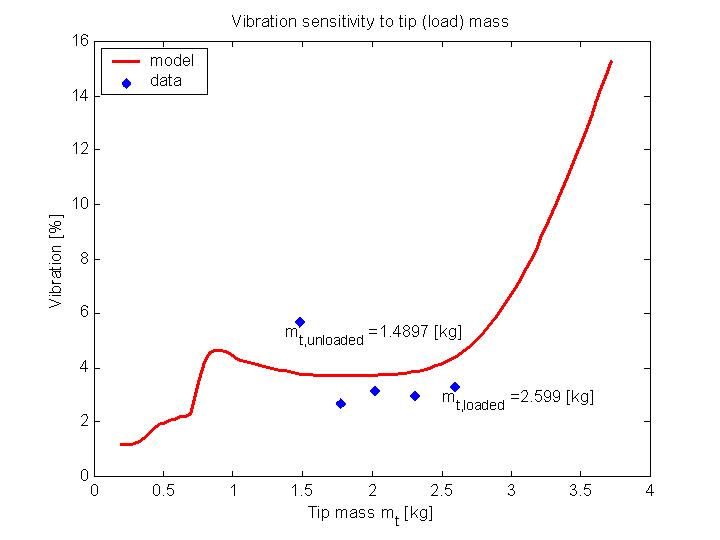
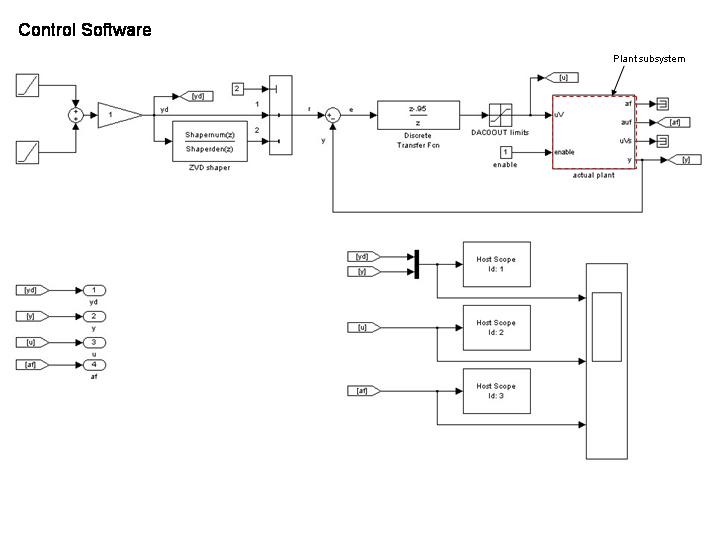
A multi-mode input shaper and PD compensator was designed for an Anorad Linear Stage for the ME 6404 class, Advanced Control Design and Implementation. The Linear Stage is a 1-D dynamic system that represents a pick-and-place manufacturing robot with a flexible end effector tip. By using a multi-mode input shaper, fast point-to-point motion was achieved with minimal relative tip deflection and virtually no residual vibration. The video clip to the right illustrates
the effects of input shaping. For more information, see the
lab report. The images below illustrate the work performed on this project. Click on the images to enlarge. |
|
||||||||
|
|||||||||