Compact Rescue Robot Testbed
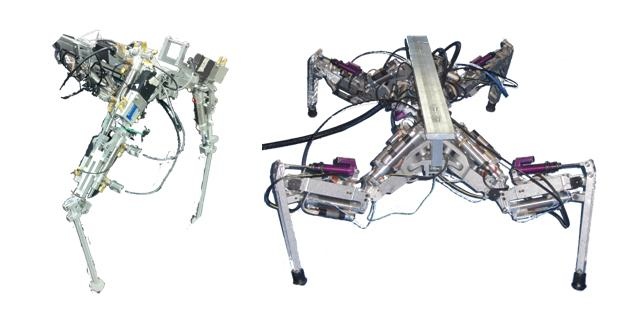
Two- and four-legged CRRs
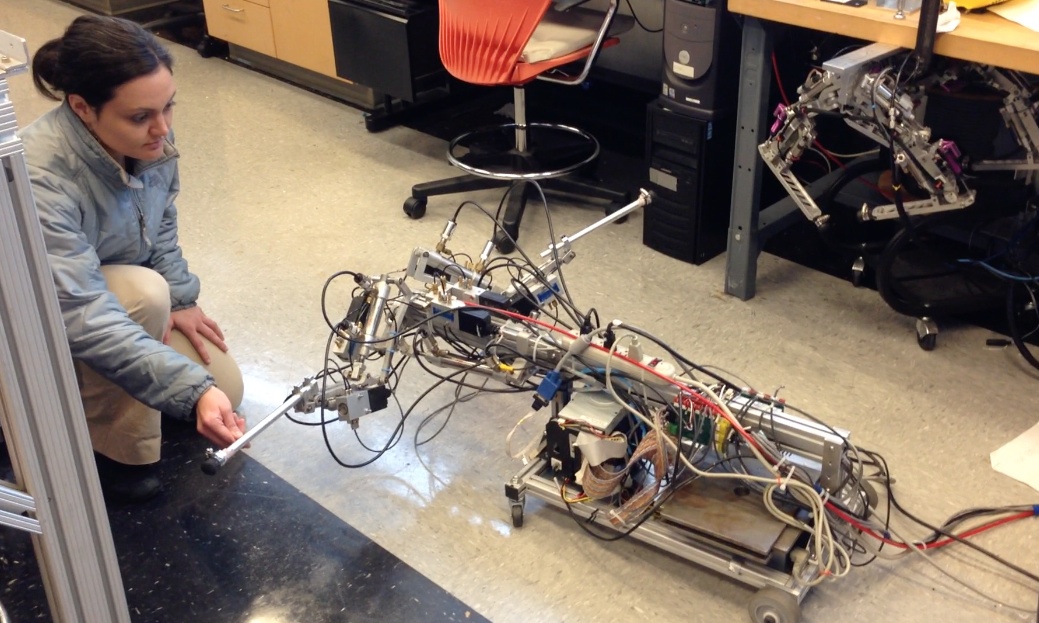
The Compact Rescue Robot, a former testbed for the Center for Compact and Efficient Fluid Power, focuses on the application of pneumatic power to emergency response. Human scale fluid-powered equipment exists only to a limited degree and with limited functionality. The large forces possible from fluid power could provide dramatic advancements in applications ranging from agriculture to construction to emergency response, particularly if it were compact, efficient and easy to use. The testbed and its associated projects were established in part to demonstrate the improvements in capability that properly designed pneumatic systems, interfaces, and compact power sources could provide to human-scale applications, and particularly search and rescue operations.
Two robots were developed: a four-legged robot with custom-valves for use with high-pressure, compact power sources was designed and built at Vanderbilt University, while a two-legged sister robot with a wheeled backend was built at Georgia Tech. Additionally, a simulation was developed that enabled users to explore interface and robot design modifications.
The robots were designed to be controlled semi-autonomously. A user interface was designed by researchers at Georgia Tech and North Carolina A & T that enabled the user to control the two front legs of the robot using two 3-DoF Phantom ™ haptic joysticks, while also receiving visual and audio feedback through a headset.

Interface and simulation. The highlighted phantoms control the corresponding legs, colored in green in the simulation.
As a researcher on the project, I worked with several collaborators on interface design and control, improved the mechanical and electrical systems to improve the capabilities and robustness of the two robots, and contributed a dynamic simulation, which also culminated in my master's thesis. For more information on the testbed goals, associated projects, and affiliated researchers, visit its
project page on the main IMDL site.
Related Publications
- Mizumoto, H, H Daepp, WJ Book and F Matsuno, "Teleoperation system using past image records for legged robot". IEEE/RSJ International Symposium on Safety, Security, and Rescue Robotics (SSRR), Kyoto, Japan, November 1 - 5, 2011.
- Chipalkatty, R, H Daepp, M Egerstedt and W Book, "Human-in-the-Loop: MPC for shared control of a quadruped rescue robot". IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco (CA), USA, September 25 - 30, 2011.
- Daepp, HG and WJ Book, "A user interface with multisensory feedback for a fluid powered rescue robot". Proceedings of 6th FPNI PhD Symposium, June 15-19 2010, West Lafayette (IN), USA (2010).