FABRIC
CONTROL AND ACTUATION
Servo Controlled Sewing Dogs
 Project
Objectives
Project
Objectives
-
The primary objective of this
research is to create a new method by which two feasibly realize automated
sewing and to test a prototype of the actuation method.
Previous attempts at automated sewing suffered from a lack of precise
fabric sensing and fabric position and tension control during the sewing
process. To address these issues a
new, incremental actuation method is proposed.
Fabric position feedback is to be based on tracking the threads of
fabric.
-
The secondary objective is to
examine fabric behavior resulting from the new actuation method proposed.
Three specific questions are addressed.
How does the width of fabric deform
when it is being translated? What
level of independent control is possible when two sheets of fabric are
partially laid on top of each other?
What level of independent control is possible when two sheets of fabric are
partially sewn together?
Project Approach and Methods
-
To address issues in previous attempts, the fabric control strategy is based
on the current feed mechanism of the sewing machine.
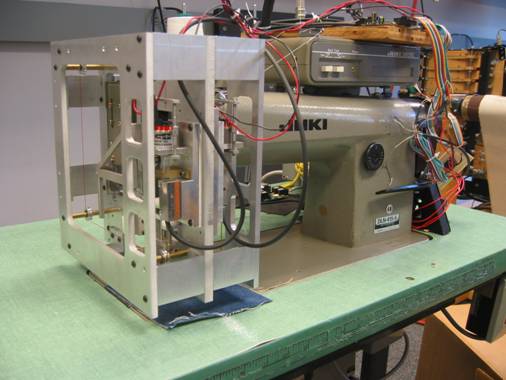
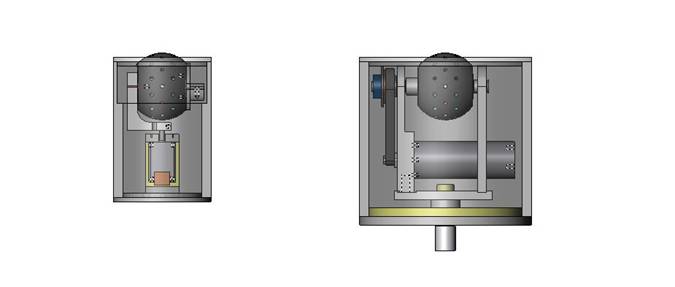
The new method involves multiple highly modified sewing dogs that are
servo controlled in multiple degrees of freedom.
These servo controlled dogs have the ability to accelerate over 25
g’s to achieve sewing rates on the order of 5,000 stitches per minute.
They receive position feedback from a thread tracking vision system
for closed loop fabric control. A
prototype of the servo controlled dog has been completed to demonstrate the
feasibility of the actuation method for multi-degree of freedom control at
high rates.
-
A test bed was built for the fabric experiments consisting of a prototype
actuator on top of a plate 1/8 inches above the table surface and a second,
static “actuator” below the plate.
Three experiments were conducted:
one to determine the effects of the actuation method described above on the
width of the fabric being moved. A
second experiment studied the amount of independent control between two
sheets of fabric separated by the plate.
The final experiment looked at the effect of trying to control two
sheets of fabric after they have been partially sewn together.
Researchers Involved
Ryder Winck – Graduate Student
Dr. Wayne Book – Faculty Advisor
Dr. Steve Dickerson – Faculty Co-Advisor
James Huggins – Research Engineer
Publications
[1] Winck,
Ryder Christian. Fabric Control for
Feeding into an Automated Sewing Machine. Master of Science Thesis,
Department of Mechanical Engineering, Georgia Institute of Technology, Atlanta,
GA, 2009.
Back to the Top
Budgers
Project Objectives
This is your brief, engaging description of your project.
Focus on what the contributions of your work are/will be.
Do not talk about how these goals will be met.
This will be in the next section.
Don’t worry, they’re going to love you.
Project Approach and Methods
This is your brief, engaging description of how you are
meeting/plan to meet your Project Objectives.
It should include a description of hardware.
Feel free to include figures and tables as needed with appropriate
captions. Be sure to reference any
work cited in the description.
Students Involved
Researcher 1 –
title (ie Graduate Student, Undergraduate Assistant, etc…)
Researcher 2 –
title (Each person’s name should be a hyperlink to their personal webpage)
Publications
Please list any and all publications.
Back to the Top
To provide feedback on this website, please contact
webmaster@imdl.marc.gatech.edu
Last revised: June 25, 2009