BACKGROUND
Proportional control valves are widely employed
for motion control in hydraulic applications. The advantages of poppet valves
over spool type valves in proportional control applications include a higher
resistance to contaminants, less faulting, high flow area to poppet displacement
ratios, excellent sealing capabilities, low cost and maintenance, and less
strict machining tolerances.
A novel type of proportional flow control valve
is manufactured by
HUSCO International. These are referred to Electro-Hydraulic Poppet
Valves (EHPV) (US
patent No. 6,328,275 and
6,745,992.) The flow control of hydraulic fluid through the valve is
achieved by changing the valve conductance coefficient, Kv, via a
pulse-width-modulated (PWM) input current acting on a pilot and a poppet type
orifice with patented pressure compensation (US
patent No. 5,878,647.) The flow control feature and the integrated
electronics of the EHPV enable the implementation of advanced control algorithms
and further extend the valve capabilities to more applications.
 A
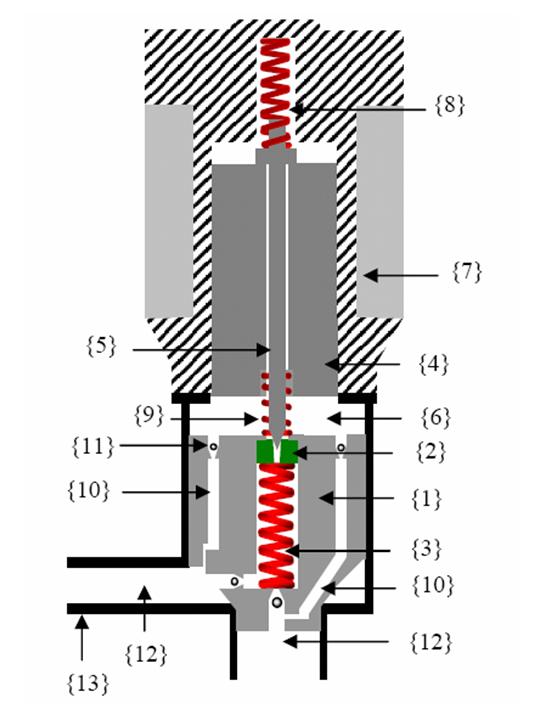
detailed explanation of the functioning of a single EHPV is explained next. The
first stage of the valve includes a main poppet element {1} and a pressure
compensation mechanism consisting of a compensating piston {2} and a tubular
spring {3}. The second stage houses an armature {4} and a pilot pin {5}. A
control pressure chamber {6} separates these two stages. In order to achieve
flow through the valve, high-pressure flow (inflow) is conducted through a small
passage {10} in the main poppet to the control chamber. When the solenoid {7} is
activated, the pilot pin is pulled and fluid is allowed to go from the control
pressure chamber through the piston and tubular spring to the low pressure side.
Such action lowers the pressure in the control pressure chamber. By lowering the
pressure in this chamber, a pressure imbalance is created across the main poppet
that enables the displacement of the latter away from the valve seat and hence a
direct passage between the inlet and outlet connections of the valve is
established. The bidirectional capability of the valve resides in the fact that
the control pressure chamber receives the high-pressure flow from either port of
the valve. Other components of the EHPV include a bias spring
{9}, check valves {11}, the inlet and outlet
connection ports {12}, and the valve cartridge {13}.
A
detailed explanation of the functioning of a single EHPV is explained next. The
first stage of the valve includes a main poppet element {1} and a pressure
compensation mechanism consisting of a compensating piston {2} and a tubular
spring {3}. The second stage houses an armature {4} and a pilot pin {5}. A
control pressure chamber {6} separates these two stages. In order to achieve
flow through the valve, high-pressure flow (inflow) is conducted through a small
passage {10} in the main poppet to the control chamber. When the solenoid {7} is
activated, the pilot pin is pulled and fluid is allowed to go from the control
pressure chamber through the piston and tubular spring to the low pressure side.
Such action lowers the pressure in the control pressure chamber. By lowering the
pressure in this chamber, a pressure imbalance is created across the main poppet
that enables the displacement of the latter away from the valve seat and hence a
direct passage between the inlet and outlet connections of the valve is
established. The bidirectional capability of the valve resides in the fact that
the control pressure chamber receives the high-pressure flow from either port of
the valve. Other components of the EHPV include a bias spring
{9}, check valves {11}, the inlet and outlet
connection ports {12}, and the valve cartridge {13}.
For motion control of hydraulic actuators, four (4) EHPV's
are used in a Wheatstone type of arrangement, as shown next.

The fact that each valve can be controlled independently
(independent metering), several metering modes are achievable.
 High side extend (HS_EXT)
High side extend (HS_EXT)
High side retract (HS_RET)
Standard extend (STD_EXT)
Standard retract (STD_RET)
Low side extend (LS_EXT)
Low side retract (LS_RET)
Other advantages include:
1.
More degrees of freedom
2.
More efficient operation
3.
Simple circuit
4.
Distributed system
5.
Ease in maintenance
HUSCO International has created a novel type of
control algorithm to be employed with the EHPV's for motion control of hydraulic
cylinders called INCOVA (INtelligent COntrol VAlve).
This algorithm is used to compute the individual valve openings (Kv)
given a commanded velocity signal a from a human operator, and the relevant
system pressures. When these opening values (Kv) are known, individual
valve's look up tables are used in an open-loop manner to command current
signals that in turn individual valve current servos deliver to each valve
solenoid. For more details consult
US patent No. 6,732,512, or the following papers:
[1] Tabor, K., (2005), "Optimal Velocity
Control and Cavitation Prevention of a Hydraulic Actuator Using Four Valve
Independent Metering", in Proc. SAE Commercial Vehicle Engineering Congress
and Exhibition.
[2] Tabor, K.,
(2005), "A Novel Method of Controlling a Hydraulic Actuator with Four Valve
Independent Metering Using Load Feedback", in Proc. SAE Commercial Vehicle
Engineering Congress and Exhibition
RESEARCH MOTIVATION AND CHALLENGES
Currently, the opening (conductance) of each EHPV is controlled via open-loop.
This is accomplished by electronically adjusting the valve’s Kv with the
aid of fixed lookup tables. In order to accurately determine the required input
for open-loop control, the relationship between the solenoid current and the
valve’s Kv is obtained via offline calibration for both flow directions
(bidirectionality).
The motivation for this research is then to
improve this process and have feedback control of EHPV’s.
It is important to mention that Feedback control could be a better alternative
to open-loop control, but it would require the use of a sensor to provide the
actual or estimated Kv value. In many applications, adding hardware (in
this case a dynamic flow meter) to implement the feedback control law is
cumbersome and expensive. Currently, feedback of the actual valve opening
is unavailable in some construction machinery (excavators for example).
The challenge is then to develop
intelligent control technology capable of learning online (i.e. while in
operation) both the steady state characteristics and transient behavior of the
component at hand along with improving its performance.
The challenge also resides as to how the learning part
can be accomplished efficiently. As such, adaptive lookup tables give an
attractive solution to the control problem, especially for the inverse
input-output mapping learning approach. The inclusion of adaptive lookup tables
in the control task enables the online learning of the dynamic behavior of such
complex systems. Particularly, adaptive lookup tables can be updated by
perceptron neural networks which are preferred for their simplicity and for
their capability to approximate and store complex nonlinear functions with the
ability to self-adapt to reflect the system’s changes that might arise as a
result of prolonged operation. Moreover, they can be used in such a way that
they learn the corresponding control input required to follow a desired state
trajectory without the need to explore the entire inverse plant dynamics map,
saving memory and effort.
There are three major advantages of doing this: first,
there would be no need of having extensive individual calibration, for a nominal
mapping from a generic component can be used for similar components and the
errors are left to be learned and corrected while in operation (fine tuning).
Second, the component’s performance can be
improved by combining feedback control with learning the true transient and
steady state characteristics, so that the system does not have to be engineered
‘sufficiently fast’. Third, by knowing how
the component is truly behaving while in operation, a maintenance scheduling can
be implemented from monitoring and detecting the deviations from the normal
pattern of behavior
RESEARCH OBJECTIVES
The research objectives are outlined and organized into
theoretical and experimental categories. Critical performance issues in the
theoretical framework to be addressed are
Development of a general
formulation for control of nonlinear systems with parametric uncertainty,
time-varying characteristics, and input saturation
Development of a
formulation for auto-calibration of nonlinear systems
Study of online learning
dynamics along with fault diagnosis
Improve flow conductance
control of EHPV’s
Critical experimental performance issues that must be
addressed in applying the general control methodology developed herein are
Analysis and validation on
the effectiveness of the proposed method
Study of the accuracy of
the auto-calibration method
Development of
computationally efficient algorithms
Development of a nonlinear
observer for state estimation for unmeasurable states
CONTROL LAW
The theory and experimental validation for this research are related to the
following control law,
This control law is derived from the following principles.
Given a discrete-time system
and
the desired state trajectory
Then, the discrete-time system can be linearized about the desired state
trajectory, and the state trajectory error (defined as
ek = dxk
- xk) is then given by

For
simplicity, the following definitions apply. (Note:
dJk is
known as the Jacobian, and dQk
is known as the Controllability matrix).
Substituting in these definitions, the state trajectory error is then given by

The
control law is then formulated as deadbeat control:

However, for this research the Jacobian and the Controllability matrices are
unknown. Hence, the main research effort will be concentrated as to develop the
theory about the closed loop stability by employing the estimates of these
matrices:

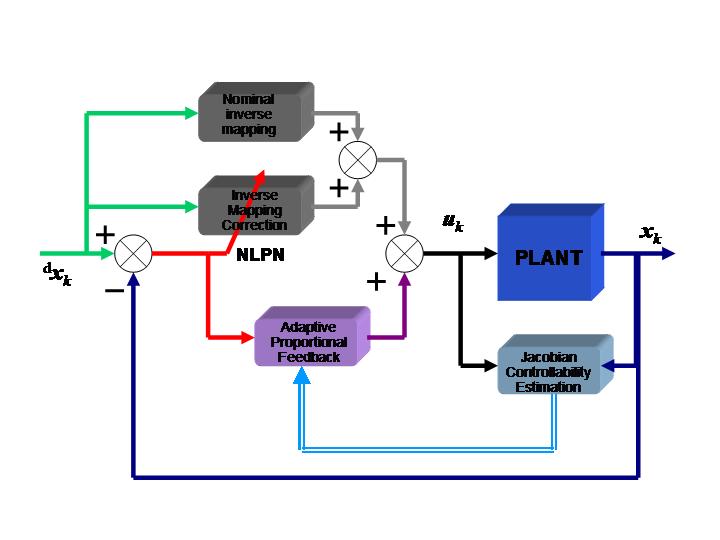
With respect to the figure showing the control law, the
"nominal inverse mapping" is given by the first term inside the parenthesis, the
"NLPN" (Nodal Link Perceptron Network, a
neural network functional approximator) is given by the second term inside the
parenthesis, while the "Adaptive proportional feedback" component is given by
the leftover terms.