 |
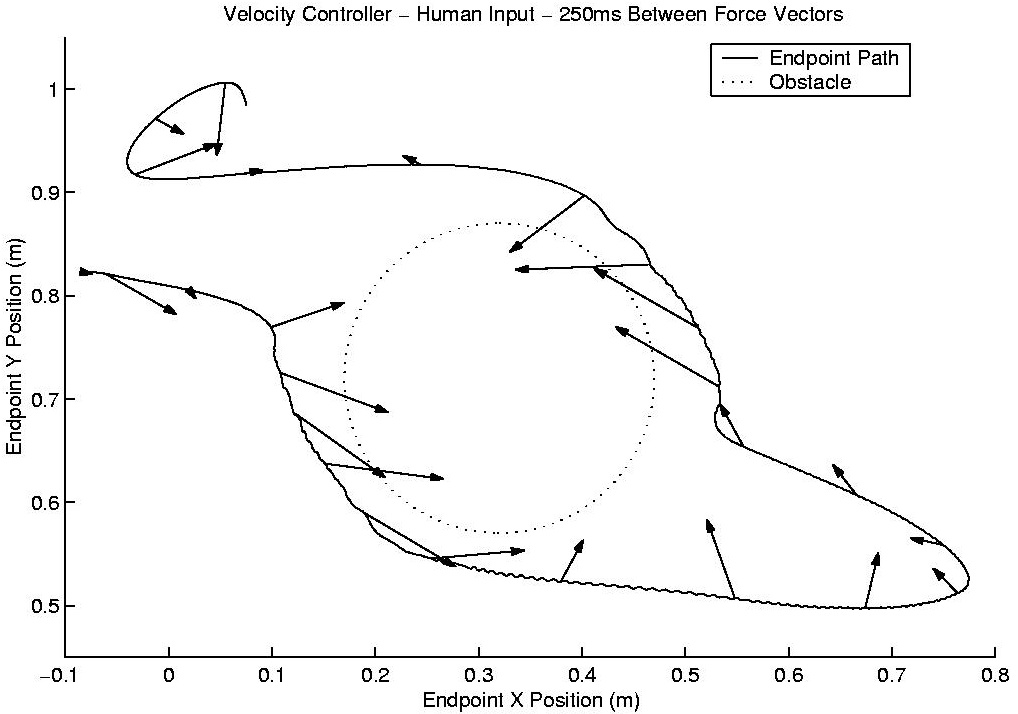 |
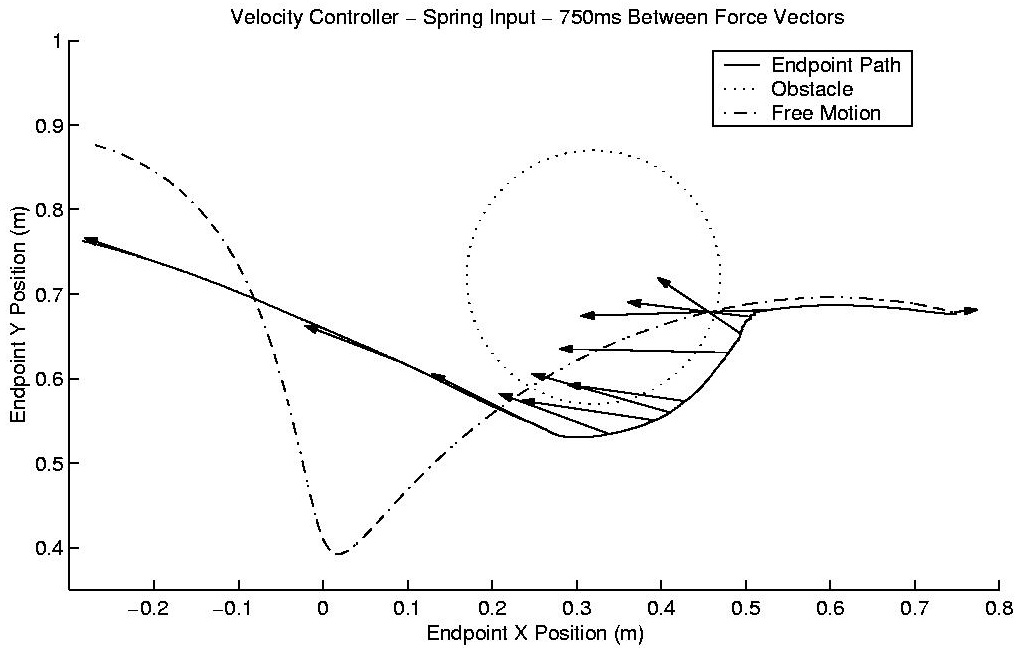
Two types of control were used. The first is a velocity-based controller. It controls the velocity of the endpoint of the device to redirect it around the obstacles in the workspace. The controller computes a desired force perpendicular to the actual velocity in order to change the direction of the device. This controller has issues with being implemented on a passive device, since at any moment in time there are forces which are not achievable, but the controller had satisfactory performance. Below are two plots of the velocity based obstacle avoidance controller implemented on PTER, using a single circular obstacle in the workspace. The left-hand plot is of a repeatable test, where a constant-force spring was attached to the tip of PTER and anchored at a point outside the workspace. The dashed line represents the path of PTER when no control is used. It is clear to see how the controller acts to redirect the path around the obstacle, while without control it goes right through the obstacle. The right-hand plot is of a human user moving PTER. In both plots, the arrows represent the applied force at the tip of PTER.
|
|
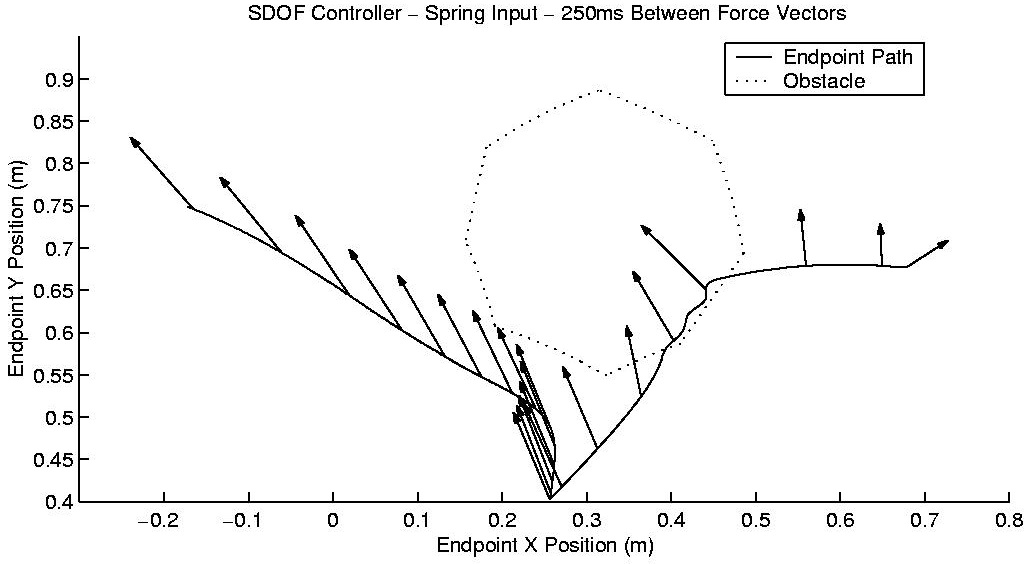
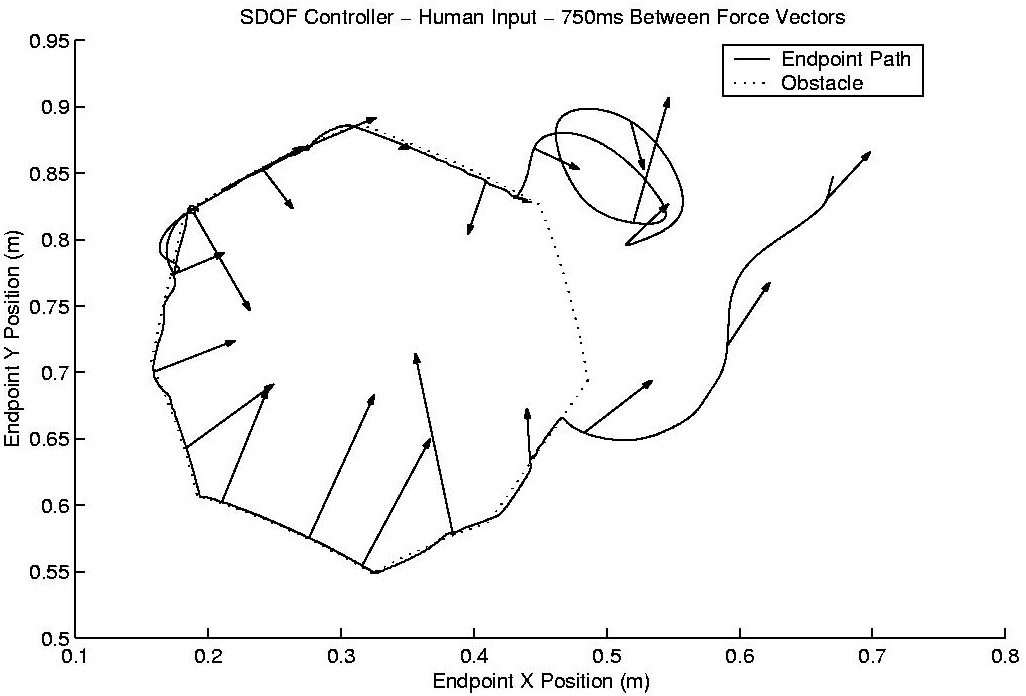
The next type of controller to be used is what has been termed a single degree-of-freedom (SDOF) controller. This controller selectively locks one of PTER's four clutches to reduce it's number of degrees-of-freedom from two to one. This controller has the advantage of being very smooth, as the velocity controller presented above exhibits a good deal of control oscillation and transmits a vibratory "feel" to the user. The disadvantage of the SDOF controller is that at any point in the workspace, there are only four possible directions in which PTER may be constrained. This restricts the shape of the obstacles defined in the workspace. Also, since the controller cannot control in which direction the user moves the device along the single degree-of-freedom line, concave corners can present problems. But, even with these restrictions, user opinion was that the SDOF controller felt and performed much better than the velocity controller.
Below are two plots of the SDOF controller implemented on PTER. The conditions are the same as the plots for the velocity controller presented above. The left-hand plot is of the repeatable spring-loaded test, and the right-hand plot is of a human operator moving PTER. Notice that the shape of the obstacle is not perfectly circular, as it is necessary to build the obstacles out of single degree-of-freedom lines.
 |
 |
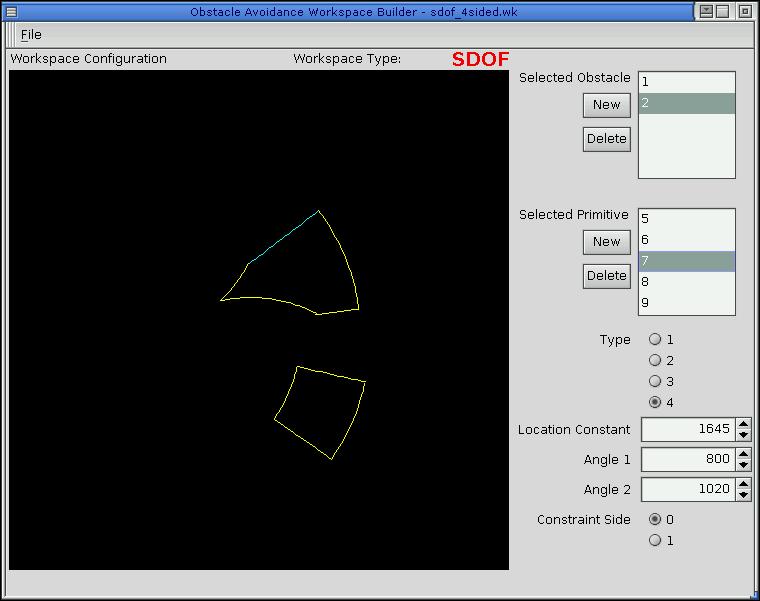
A Workspace Builder application was written in QNX (the real-time OS on which PTER's control code was developed) to simplify the creation of workspace definition files. The builder allows single degree-of-freedom lines to be placed in the workspace, and outputs a text definition file which can then be read in by PTER's control code.
For more information on this research, see: