OPERATOR INTERFACES FOR MOBILE
HYDRAULIC EQUIPMENT
▼ Excavator Interface▼ ▼Advanced Hand Controllers▼ ▼Backhoe Interface▼
Excavator Simulator for Operator Interface Evaluation


Project Objectives
Previous research has shown that operators perform better with position control than rate control, except for devices with large workspaces or slower dynamics and for tracking tasks. The goal of this research is to find why rate control is better than position control for large workspace or dynamically slow manipulators, such as the excavator pictured above. Advanced hand controllers are also being prototyped to improve the intuitiveness of hydraulic machines.
Project Approach and Methods
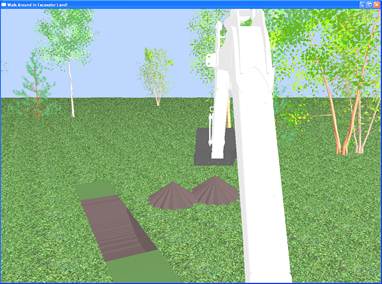
An excavator simulator has been developed that mimics the dynamics of a mini-excavator’s hydraulic circuit and mechanical linkage while digging. The dynamics are simulated in real time along with a new soil model created for this simulation. The simulated arm and environment are displayed to the operator on a 52 inch LCD TV that is mounted to the windshield of a Bobcat 435 excavator cab. The operator sits in the cab to manipulate the input devices, while sound proportional to the engine load is played. Currently, two input devices have been installed in the cab, electronic joysticks like those used in similar equipment, and a Phantom Premium 1.0A. The Phantom is used for coordinated control. Click for a video of the simulator workstation, or click here to see it in action.
Simulator Workstation
|
|
|
|
|
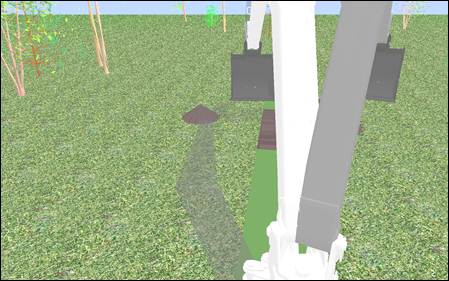
Operator Workstation – A modified excavator cab with a TV mounted on the windshield. The top left photo on this page is a screenshot from the simulator’s TV. |
||
|
|
||



Simulator Input Devices
|
|
|
|
Phantom Premium 1.0A – now mounted in the cab |
Sauer-Danfoss electronic joysticks |


Two coordinated control schemes have been developed for a mini-excavator and tested for increases in operator effectiveness and machine efficiency. Both coordinated control schemes use a Sensable Phantom with four degrees of freedom and three degrees of force feedback freedom. The first coordinated control scheme was a position-position controller. The second was a hybrid controller design that uses position control in two dimensions and velocity control in the other dimension. Haptic feedback was built in to give the operator a sense of the digging forces, or to be more specific, the force being applied to the bucket by the environment.
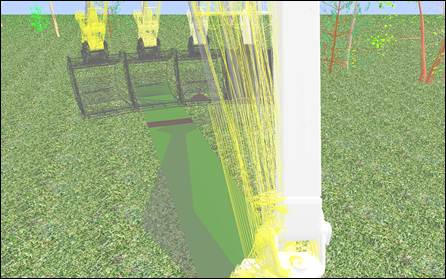
To test if matching the feedback to the operator’s intent will make position control superior to rate control, even for machines with large workspaces or slow dynamics (like excavators), a ghost arm has been added to the simulator that shows the operator his commanded position. The ghost arm gives the operator the position of his command, which is also a position command from the phantom. Without the ghost arm, the dynamics of the excavator are slow enough that the operator must guess the position that he is commanding, and, hence, the position of that the excavator is going to.
|
|
|
|
||||||
|
||||||||
Results
Some tests have already been performed, and the results are reported in the publications listed below. The results of a test comparing Phantom interface to the standard joystick interface found that novices perform as well with the phantom as experts with the joysticks.
In August, 2011, with help from the MAHA Fluid Power Lab at Purdue, the Phantom was used to control an actual mini-excavator. Click for a video of the excavator under Phantom position control and under Phantom hybrid control. The ghost arms are still being developed, but a copy of my proposal is available here. For more information, contact me at:
![]()
Researchers Involved
Mark Elton – Graduate Student
Wayne J. Book – Faculty Advisor
James D. Huggins – Research Engineer
Publications
- Elton, M., Enes, A., and Book, W., “A Virtual Reality Operator Interface Station with Hydraulic Hardware in the Loop Simulation for Prototyping Excavator Control Systems”, IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Singapore, 2009.
- Elton, Mark and Book, Wayne, “Operator Efficiency Improvements From Novel Human-Machine Interfaces,” Proceedings of the 6th FPNI-PhD Symposium, West Lafayette, Indiana, USA, June 15-19, 2010, pp. 315-322.
- Osafo-Yeboah, B., Elton, M., Jiang, X., Book, W., Park, E., “Usability Evaluation of a Coordinated Excavator Controller with Haptic Feedback”, 2010 Industrial Engineering Research Conference, Cancun, Mexico.
- Elton, Mark and Wayne Book, “An Excavator Simulator for Determining the Principles of Operator Efficiency for Hydraulic Multi-DOF Systems,” Proceedings of the 52nd National Conference on Fluid Power, Las Vegas, March 23-25, 2011.
- Elton, Mark and Book, Wayne, “Comparison of Human-Machine Interfaces Designed for Novices Teleoperating Multi-DOF Hydraulic Manipulators,” 20th IEEE International Symposium on Robot and Human Interactive Communication, Atlanta, USA, Aug. 1-3, 2011.
Advanced Hand Controllers
Conventional human machine interfaces for hydraulic machines use joint rate control, which is not intuitive. Operators require lots of training to become experts and even experts make mistakes due to the high cognitive loads. Previous work described above using the Phantom interface demonstrated the capabilities of coordinated position control to improve the task and fuel efficiency of hydraulic machines by enabling humans to operate the machines more effectively. However, there are a number of challenges that stand in the way of implementing coordinated position control on hydraulic machinery, including biodynamic feedthrough, operator fatigue, potential for unwanted machine motion, the operator's lack of knowledge of their position command, accuracy loss due to position scaling, and the need to sense joint angles. New hand controllers are being created to realize the benefits of coordinated position control while addressing the challenges. Three such controllers are pictured in the figure below. The hand controllers in the left and center of the figure have been used in a human subject experiment comparing there performance with conventional joysticks. The results are to be published as shown below. Click here for a video showing the experimental test bed and new hand controllers.
|
|
|
Novel hand controller designs interfaced with the excavator simulator. |
%20crop.jpg)
%20crop.jpg)

Publications
Winck, R., M. Elton, and W.J. Book, “Advanced hand controllers for hydraulic machines.” Automation in Construction. (in preparation)
Researchers Involved
Ryder Winck – Graduate Student
Wayne J. Book – Faculty Advisor
James D. Huggins – Research Engineer
Modeling and Compensation for Biodynamic Feedthrough in Haptic Backhoe Operation


Project Objectives
What is biodynamic feedthrough?
In some operator-controlled machines, motion of the controlled machine/vehicle excites motion of the human operator, which is fed back into the control device, causing unwanted input and sometimes instability; this phenomenon is termed biodynamic feedthrough.
Biodynamic feedthrough often causes undesirable
oscillations in mobile heavy equipment operation.
Research Objectives
This research seeks to investigate and develop compensation for biodynamic feedthrough, thus providing heavy equipment operators with an interface that is easier to use and making equipment operation more effective and efficient.
Project Approach and Methods
The approach is
summarized in the following steps.
- Create models of the biodynamic feedthrough, represented as transfer functions for each component
• Limit the system to a single degree of freedom: fore-aft motion only, controlling only the stick link
- Test a variety of possible compensation methods, first using simulations
- Implement the most effective and feasible options in hardware
- Perform human factors testing to evaluate effectiveness
Students Involved
Heather Humphreys – Graduate Student
James D. Huggins – Research Engineer
Wayne J. Book – Faculty Advisor
Publications
Humphreys, H., W. Book, “Modeling of Biodynamic Feedthrough in Backhoe Operation,” 2009 ASME Dynamic Systems and Control Conference (submitted).
More Information About Biodynamic Feedthrough and the Haptic Backhoe
More information on Heather’s research on biodynamic feedthrough can be found here.
Earlier work by Matt Kontz on the Haptic Backhoe can be found here.