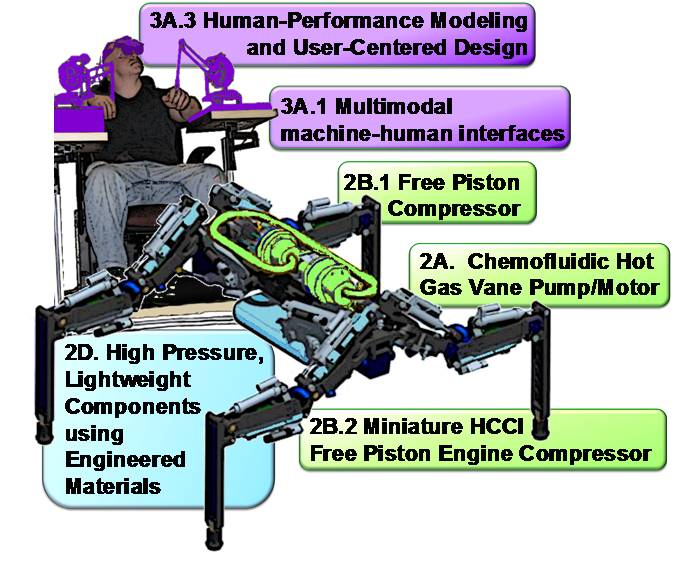
An overview of how various CCEFP projects are can be applied to Testbed 4
RESCUE ROBOT
Human scale fluid powered equipment exists only to a limited degree and with limited functionality. The large forces possible from fluid power could provide dramatic advancements in applications ranging from agriculture to construction to emergency response, particularly if it were compact, efficient and easy to use. The CCEFP Strategic Plan identifies the following challenges at this power level:
It is on emergency response that Test Bed 4, the Compact Rescue Robot, focuses. On examination one sees that a rescue robot epitomizes several of the challenges listed above as relevant to this power level. Given the highly unpredictable nature of disaster sites, human supervision is an important component as it would be in the unstructured environments of construction and agriculture. Scenes from recent disaster sites in Haiti, Japan and elsewhere speak to the merit of applying fluid power technology to a need that knows no national boundary.
1. The main objective of this
research is to test proposed projects in the Center for Compact and Efficient
Fluid Power (CCEFP) specifically targeted towards mobile human power scale
equipment.
2. The secondary objective is to
develop user control and interface in order to effectively and efficiently
operate compact and efficient fluid power for a high degree of freedom system,
specifically a quadruped robot.
Testbed 4 is shared between two universities:
Several
additional CCEFP projects have been involved with Testbed 4 at Georgia Tech,
including projects 3A.1, 3A.2, 3A.3, and 2B.1, among others. Project
3A.1, also based at Georgia Tech under the guidance of Dr. Wayne Book, studies
the use of multi-modal human interfaces when applied to hydraulic equipment, but
with results on operator performance and desires that can affect how the rescue
robot interface is designed. The now retired
Project 3A.2 focuses on passified chemofluidic and pneumatic control, which
is led by Prof Perry Li from
To effectively navigate through disaster sites such as mine collapses and earthquake rubble, this rescue robot must be capable of maneuvering through very rough and dynamic terrain.
This task warrants a control system that is remote controlled and can simultaneously command several degrees of freedom. In order to provide the operator with the necessary information regarding the environment and the rescue robot to effectively perform tasks, multiple senses are fed back to the operator: visual, haptic, and audio.
In order to ensure an intuitive and flexible interface, multiple modes of operation are proposed: autonomous, guided gait coordination (semi-autonomous), and manual control. Autonomous would be ideal for fairly smooth terrain; guided gait coordination would be ideal for more rough terrain; and manual would be ideal for very rugged terrain and task implementation such as moving a piece of debris. In a semi-autonomous configuration, the operator has control of the front legs while the trailing legs follow similar motion trajectories. Additionally, the operator receives haptic feedback that provides a sense of balance, such that stability of the robot can be assured while also allowing forward motion, resulting in a "haptically guided gait". For the manual control, the operator has control of every leg (note: that operator can only control one leg at a time due to center of gravity stability issues).
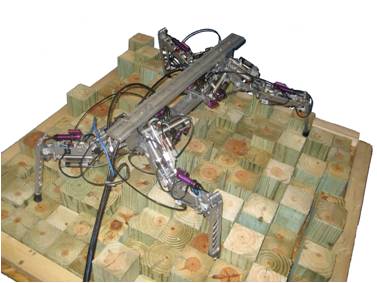
As noted earlier, the robots used in this project are pneumatically actuated, which gives them advantages in power and force density. A quantitative analysis by universities within the CCEFP showed that systems using fluid powered power sources in place of electrical ones resulted in systems in less overall mass for a given operation time than equivalent battery powered ones. Testbed 4 will showcase some of these advantages through usage of power sources such as the CCEFP developed free piston compressor to demonstrate mobile systems capable of lifting large quantities and operating for long time periods despite generally low overall mass. Indeed, in tethered trials at Vanderbilt University, the quadruped robot was able to demonstrate walking while carrying 80% of its own body mass, or approximately 10 kg.
Several versions of the robot have been developed for use in this system,
including a four-legged version for mobility and manipulation testing, a
simulated quadruped for design development, and a two-legged version for use
with manipulation, simulation validation, and operator interface development.
While the dimensions, actuation strategies, and purposes of these robots vary,
they are related by the fact that they are fundamentally of the same kinematic
structure. The motivation for these kinematics is primarily based on past
manipulator design and the overall goals of this particular testbed, as
discussed extensively in theses by past graduate students Brian Guerriero and
Keith Wait.
The quadruped robot during gait testing with and without additional loads at Vanderbilt
The four-legged robot was initially developed at Vanderbilt by Dr. Michael Goldfarb and Keith Wait. Featuring Bimba cylinders with custom rotary valves created at Vanderbilt University, It uses 12 actuators controlled by independent microcontrollers that receive signals via a CANbus connection from a Target PC containing the primary Simulink software. Following its transfer to Georgia Tech, this robot was updated to function in real-time with xPC Target and work more robustly than previous versions. Current work with this robot focuses on its implementation in test environments, intuitive operation of a user guided quadruped over varying terrain types, and achievement of tasks deemed useful for rescue robotics, such as removing obstructions and aiding victims.
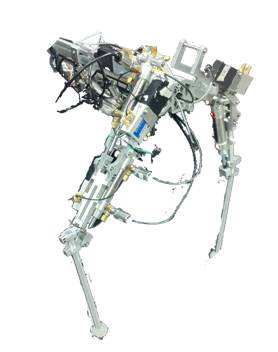
A separate two-legged robot is used to examine control of multi-DoF pneumatically actuated manipulators. Equipped with a design that permits a larger workspace than the quadruped, as well as pressure and position sensors, this robot provides further versatility in improving pneumatic controls for different kinds of tasks. Like the quadruped, the two-legged version also accepts commands from the haptic joysticks on the user interface and provides feedback to the user.
As with most complex systems, goal-oriented design of the CRR's mechanical and software components is better achieved if the system is well understood. A simulation has been developed to aid this understanding that combines an actuator model, written in Simulink, with a kinematic and dynamic model of the robot, created using SrLib, a dynamics library developed at Seoul National University. The simulation presents a comprehensive basis for evaluation of fluid power in robotics by coupling modeling of pneumatic actuation with a dynamics and environment simulation. Since the simulation of the robot and environmental interactions is solved in real-time, researchers are able to fully examine altered dynamics and effectiveness of control schemes following system modification. Additionally, the simulation provides flexibility in design of the operator interface: The outputs are related to the operator via graphic output and haptic feedback, providing user insight to the effects of fluid power on legged rescue robot versatility.
An operator manipulates a simulated robot (though without actuator dynamics) using the operator interface

The robots described above all posess two or more legs, with the
intent of achieving mobility and manipulation. To do so, they are coupled with
an operator interface (Figure 6) that inputs user commands from two Phantom (TM)
haptic joysticks and returns multimodal feedback, such as audio and visual
options in additon to haptic feedback.
The user interface has been further
enhanced through collaborations with projects 3A.1, 3A.2, and 3A.3, as well as
collaborations outside the CCEFP. Hisashi Mizumoto, a visiting researcher from
Kyoto University, is currently implementing his "bird's eye view" component in
the interface, which allows the user to see an OpenGL projection of the robot in
its environment using a combination of a single camera on the robot and the
knowledge of its whereabouts and configuration (joint angles). Additionally,
work with GT Robotics student Rahul Chipalkatty has resulted in the
implementation of a model predictive control based guided gait strategy to
ensure that the robot maintains static stability while allowing the operator to
guide it its leg placement and overall motion.
Many of the resulting
achievements from this testbed and its associated collaborations have been
document and can be found in the Publications section below.
Dr. Wayne Book - Faculty Advisor, Georgia Tech
Hannes Daepp - Graduate Student, Georgia Tech
J.D. Huggins - Research Engineer, Georgia Tech
Hisashi Mizumoto - Visiting Researcher from Kyoto University, Georgia Tech
Michael Valente - Undergraduate Researcher, Georgia Tech
Dr. Steven Jiang -
Faculty Advisor,
Antonio Lee - Graduate
Student,
Ritson Delpish -
Graduate Student,
Benjamin Osafo-Yeboah
- Graduate Student,
Charlie Chung -
Graduate Student,
Dr. Perry Li -
Faculty Advisor,
Venkat Durbha -
Graduate Student,
Guerriero, B., "Haptic control and operator-guided gait coordination of a
pneumatic hexapedal rescue robot," Master's thesis, Georgia Institute of
Technology, 2008.
Wait, K.W., The Use of Pneumatic Actuation to Address Shortcomings Concerning
Normalized Output Power in State of the Art Mobile Robotics. PhD thesis,
Vanderbilt University, 2010.
Wait, K.W. and Goldfarb, M. "Enhanced performance and stability in pneumatic servosystems with supplemental mechanical damping," Journal of Dynamic Systems, Measurement and Control, vol. 132, 2010.
Daepp, H.G., W.J. Book, T.Y. Kim and P.P. Radecki, "An interactive simulation for a fluid-powered legged search and rescue robot," Proceedings of the 2010 International Symposium on Flexible Automation, Tokyo, Japan, July 12 - 14, 2010.
Daepp, H.G. and Book, W.J., "User interface with multisensory feedback for a fluid powered rescue robot," in 6th FPNI - PhD Symposium, 2010.
Daepp, H.G. and Book, W.J., "Modeling and Simulation of a pneumatically-actuated rescue robot," in 52nd National Conference on Fluid Power, 2011.
Chipalkatty, R., H. Daepp, M. Egerstedt, and W. Book, "Human-in-the-Loop: MPC
for Shared Control of a Quadruped Rescue Robot," IEEE/RSJ International
Conference on Intelligent Robots and Systems, San Francisco, CA, Sept 2011. To
appear.