▼ Array Control▼ ▼ Force Estimation▼ ▼Practical Structural and Control Design ▼
Array Control
Project Objectives
This research focuses on the application of singular value decomposition (SVD) and semi-nonnegative matrix factorization (SNMF) within feedback control systems, called the SVD System and SNMF System, to control multiple subsystems with reduced control inputs. The motivation for this work is a pin array human machine interface, called Digital Clay. Digital Clay uses a technique to control the pins, called the row-column method, which reduces the number of control valves from nxm to n+m. The SVD and SNMF Systems permit simultaneous, dependent control of sets of subsystems that are coupled by the row-column method. The use of the SVD differs from previous control applications because it reduces the dimension of the control inputs. The application of the SNMF in control systems is new in itself. The research includes theoretical analysis of the SVD and SNMF Systems as well as the physical implementation of both. Additionally, an open loop procedure is being developed that uses the SVD and the SNMF to improve on the line scanning procedure currently used with Digital Clay. These open loop methods are applied as command generators for the SVD and SNMF Systems.
Project Approach and Methods
The new control algorithms in this research are based on singular value decomposition (SVD) and semi-non-negative matrix factorization (SNMF). Both SVD and SNMF are used in a new feedback control structure (SVD feedback shown in figure below). They are used to reduce the dimension of the control signals to meet the constraints of the row-column system. The implementation of SVD requires four quadrant multiplication of the row and column inputs. Therefore, SNMF is used in place of SVD for the specific implementation on Digital Clay, whose column inputs can only take non-negative values. Each decomposition is also employed to define an open loop technique for generating “intermediate surfaces”. While this technique does not directly apply to control of Digital Clay, because of the devices need for feedback, it provides a useful way to generate commands for the feedback controllers and also provides a clear motivation for the feedback control techniques.
Researchers Involved
Ryder Winck – Graduate Student
Dr. Wayne Book – Faculty Advisor
JD Huggins – Research Engineer
Publications
Winck, R., and W.J. Book, “Dimension Reduction in a Feedback Loop using the SVD: Results on Controllability and Stability.” Automatica. (submitted)
Winck, R., and W.J. Book, “Methods for Computing the SVD Rank-one Approximation in a Feedback Loop,” ASME Dynamic Systems and Control Conference, October 2012. (submitted)
Winck, R., W.J. Book, “A Control Loop Structure Based on Semi-Nonnegative Matrix Factorization for Input-Coupled Systems,” IEEE American Control Conference, June 2012.
Force Estimation and Control for Material Property Simulation
Project Objectives
The sense of touch, associated with feeling an
object’s shape, texture and properties plays an important aspect in everyday
life to interpret information about the surroundings whether most people are
aware of it or not. Visual and auditory input/output devices such as monitor
and speakers have become commonplace but there has yet to be a standardized
input/output device that generates intended and controlled mechanical signals
to stimulate the human kinesthetic and touch channels and for human to react to
the virtual environment. Although shape display has been achieved with the
current 5x5 Digital Clay prototype, there left much to be desired of its haptic
potential. Thus this work seeks to investigate, design and implement a force
control capability for the current prototype which is robust, low cost and does
not add structural or hardware complexity to the existing design.
Although shape display has been achieved with the
current 5x5 Digital Clay prototype, there left much to be desired of its haptic
potential. Thus this work seeks to investigate, design and implement a force
control capability for the current prototype which is robust, low cost and does
not add structural or hardware complexity to the existing design.
Project Approach and Methods
The force control of hydraulic actuators has always been a challenge due to high nonlinearities of fluid flow and compressibility. Furthermore, force sensor used is high in cost, and introduces noise. For the application that is Digital Clay, the use of embedded force sensor is not considered the most favorable option to keep the overall cost and hardware complexity at the minimum.
The current approach to that is to investigate the possibility of sensorless force estimation and using the estimate for force control. Traditional Luenberger observers and Kalman filter are used widely to estimate unmeasured states and even proved to be better than direct measurements. The proposed structure for sensorless force estimation and control is shown in Figure 1. The observed state will be used as feedback signal to achieve force control.
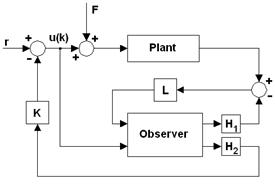
Figure 1. Proposed Structure of Observer-based Force Control
A detailed mathematical model is derived for the construction of the observer. The figures below shows how the model and the observer compares to actual displacement and force measurements of a single cylinder actuator respectively.
Figure 2. Displacement measurement comparison Figure 3. Force measurement comparison
Although the observer is able to estimate the force exerted on the cylinder actuator, there are other dynamics which are still not considered in the model. Future works will seek to include those unmodeled dynamics as accurate as possible and the use of a robust observer to achieve good accuracy. Then force control can be performed for each actuator.
Researchers Involved
Nicholas Ngoo – Graduate Student
Dr. Wayne Book – Faculty Advisor
JD Huggins – Research Engineer
Publications
Ngoo, C.S., and Book, W.J., 2010. “Digital Clay Force Observer Design and Shape Editing Concept”. 2009 ASME Dynamic Systems and Control Conference, 2, October, pp. 1289-1291.
Ngoo, C.S., 2009. “Admittance and Impedance Haptic Control for Realization of Digital Clay as an Effective Human Machine Interface (HMI) Device”. Master’s Thesis, Georgia Institute of Technology, Atlanta, GA.
Practical Structural and Control Design for Digital Clay
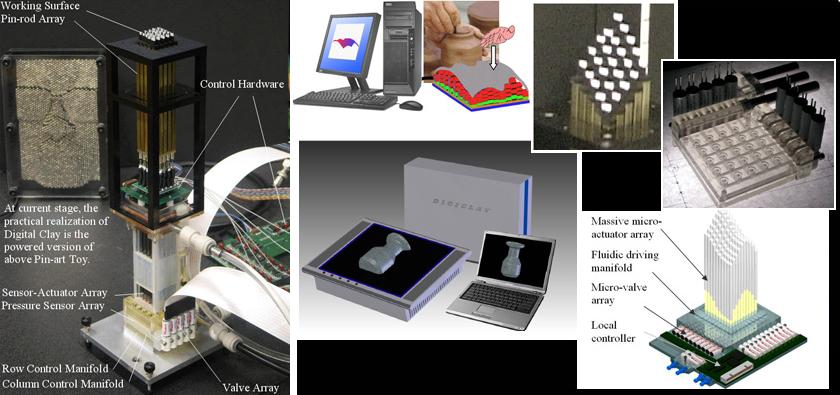
Project Objectives
Digital Clay is proposed as a next generation human-computer interfacing device based on a morphing, tangible and haptic surface. This document embraces this revolutionary concept and seeks to give it a physical embodiment that will confirm its feasibility and enable experimentation relating to its utility and possible improvements. The pin-rod planar array approach is investigated in this work. Per this approach, Digital Clay could be described as a “3D monitor” whose pixels can move perpendicularly to the screen to form a morphing surface. Users can view, touch and modify the shape of the working surface formed by these “pixels” (i.e.,the tips of micro hydraulic actuators)
Project Approach and Methods
Researchers Involved
Haihong Zhu – Former Graduate Student/ Post-Doc
Dr. Wayne Book – Faculty Advisor
JD Huggins – Research Engineer
Selected Publications
H. Zhu, W. Book, “Digital Clay Next Generation Man-machine Interface”, International
Conference on Robotics and Automation,
H. Zhu, W. Book, “Embedding and Multiplexing Large Scale Sensor Arrays for
Digital Clay”, Proc. ASME International mechanical Engineering Congress and
Exposition,
H. Zhu, W. Book, “Practical Structure and Control Design for Digital Clay”, Proc.
ASME International mechanical Engineering Congress and Exposition,
H. Zhu, W. Book, “Speed Control and Displacement Estimation Using PWM for
Digital Clay”, Proc. Japanese
H. Zhu, W. Book, “Control Concepts for Digital Clay”, Proc. of IFAC
Symposium on Robot